Rockwell Automation Publication MOTION-UM003K-EN-P - January 2019 143
Configure Integrated Motion Using a PowerFlex 527 Drive Chapter 6
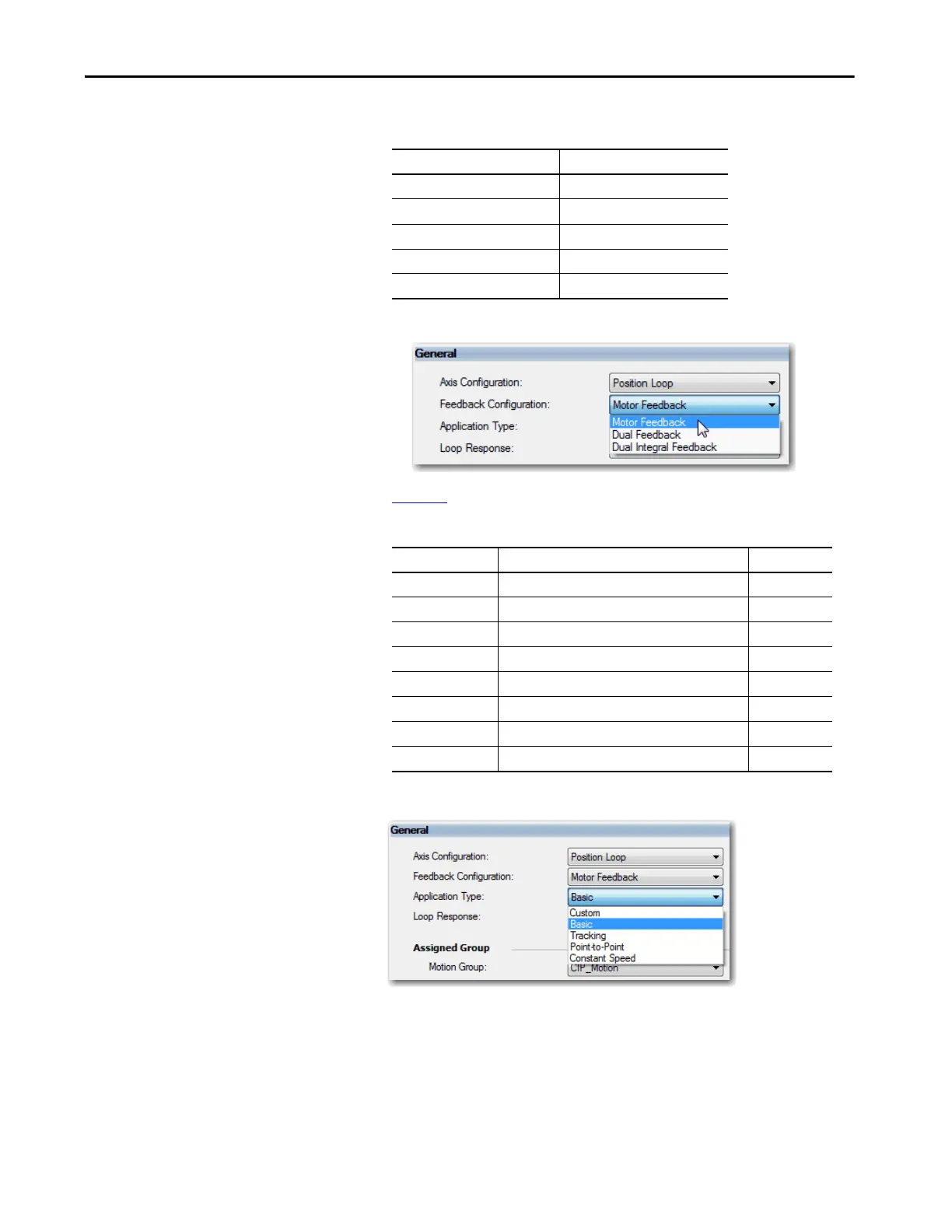
3. Choose a Feedback Configuration type.
Table 43
compares the feedback type and loop type.
4. Choose an Application Type, if applicable.
Table 42 - Compare the Axis Configuration Types for the Drives
Axis Type PowerFlex 527
Position Loop (P) Yes
Velocity Loop (V) Yes
Torque Loop (T) No
Feedback Only (N) No
Frequency Control (F) Yes
Table 43 - Compare the Feedback Type and Loop Type
Feedback Type Axis Type PowerFlex 527
Motor Feedback Position Loop (P), Velocity Loop (V),Torque Loop (T) No
Motor Feedback Position Loop (P), Velocity Loop (V) Yes
Load Feedback
Position Loop (P), Velocity Loop (V),Torque Loop (T) No
Dual Feedback Position Loop (P) No
Dual Integrator Position Loop (P) No
Master Feedback Feedback Only (N) No
No Feedback
Frequency Control (F) Yes
No Feedback Velocity Loop (V) No
TIP Application Type defines the servo loop configuration automatically. These
combinations determine how the calculations are made, which can reduce
the need to perform an Autotune or a Manual Tune.

 Loading...
Loading...












