296 Rockwell Automation Publication MOTION-UM003K-EN-P - January 2019
Chapter 14 Status, Faults, and Alarms
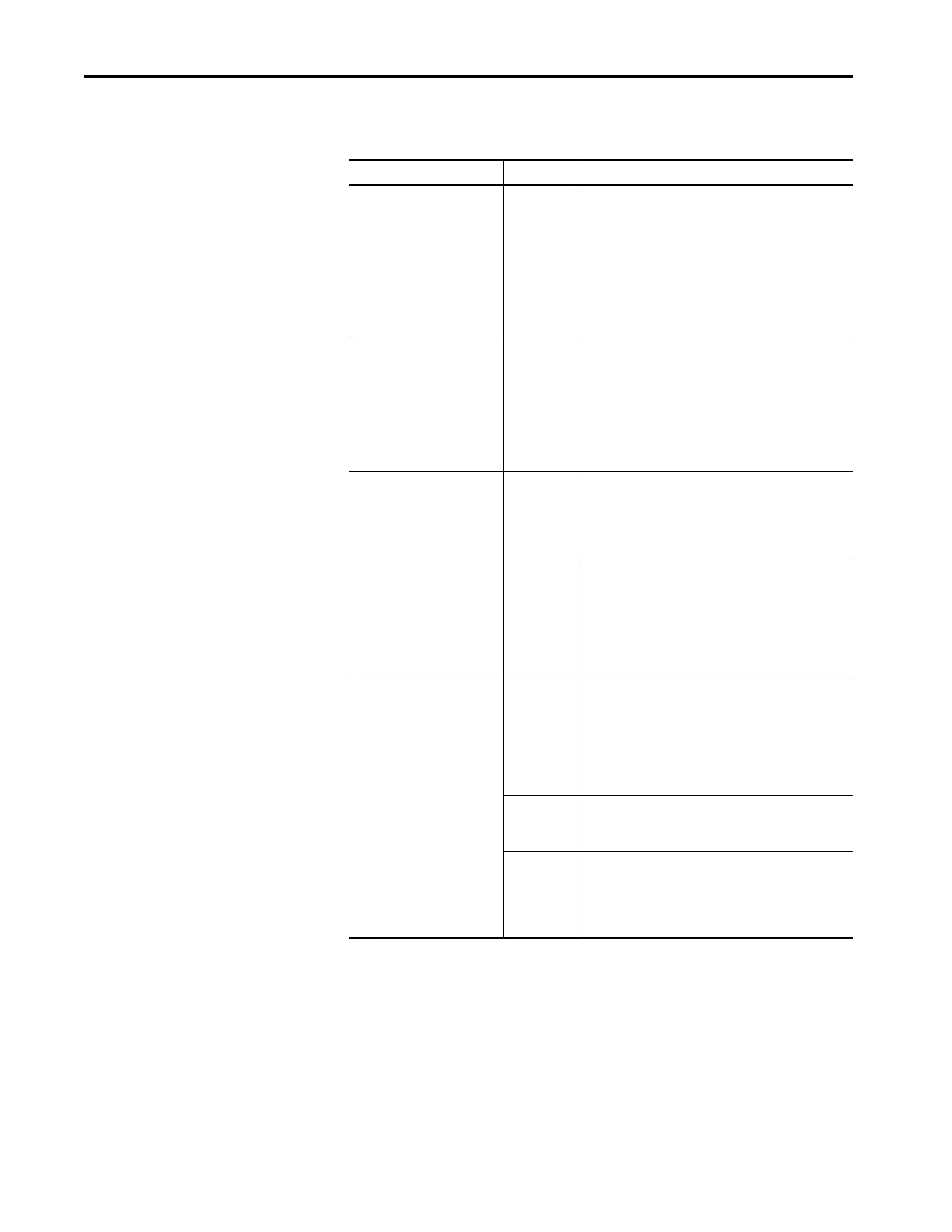
Table 66 - Action Tasks and Related Faults
Task Choose Description
Shut down the axis and let it
coast to a stop.
Shutdown Shutdown is the most severe action. Use it for faults that could
endanger the machine or the operator if you do not remove
power quickly and completely.
A fault happens when the following occurs:
• Axis servo action is disabled
• Servo amplifier output is zeroed
• Appropriate drive enable output is deactivated
• OK contact of the servo module opens. Use this contact to
open the E-stop string to the drive power supply
Stop the axis and let the drive
stop the axis where you use the
Stopping Action attribute to
configure how to stop the drive.
Disable A fault happens when the following occurs:
• Axis servo action is disabled
• Servo amplifier output is zeroed
• Appropriate drive enable output is deactivated
• Drive switches to local servo loop control and the axis are
slowed to a stop using the Stopping Torque
• The servo action and the power structure are disabled if the
axis doesn’t stop in the stopping time
Leave the servo loop on and stop
the axis at its Maximum
Deceleration rate.
Stop Planner Use this fault action for less severe faults. It is the gentlest way
to stop. Once the axis stops, you must clear the fault before
you can move the axis. The exception is Hardware Overtravel
and Software Overtravel faults, where you can jog or move the
axis off the limit.
A fault happens when the following occurs:
• Axis slows to a stop at the Maximum Deceleration Rate
without disabling servo action or the servo module Drive
Enable output
• Control of the servo loop of the drive is maintained
• Axis slows to a stop at the Maximum Deceleration rate
without disabling the drive
Write your own application code
to handle the fault.
Fault Status
Only
Use this fault action only when the standard fault actions are
not appropriate. With this fault action, you must write code to
handle the motion faults. For Stop Motion or Status Only, the
drive must stay enabled for the controller to continue to
control the axis. Select Status Only to let motion continue only
if the drive itself is still enabled and tracking the command
reference.
Ignore Ignore instructs the device to ignore the exception condition.
For some exceptions that are fundamental to the operation of
the axis, it is not possible to Ignore the condition.
Alarm Alarm action instructs the device to set the associated bit in
the Axis Alarm word, but does not otherwise affect axis
behavior. For some exceptions that are fundamental to the
operation of the device, it is not possible to select this action or
any other action that leaves device operation unaffected.
 Loading...
Loading...













