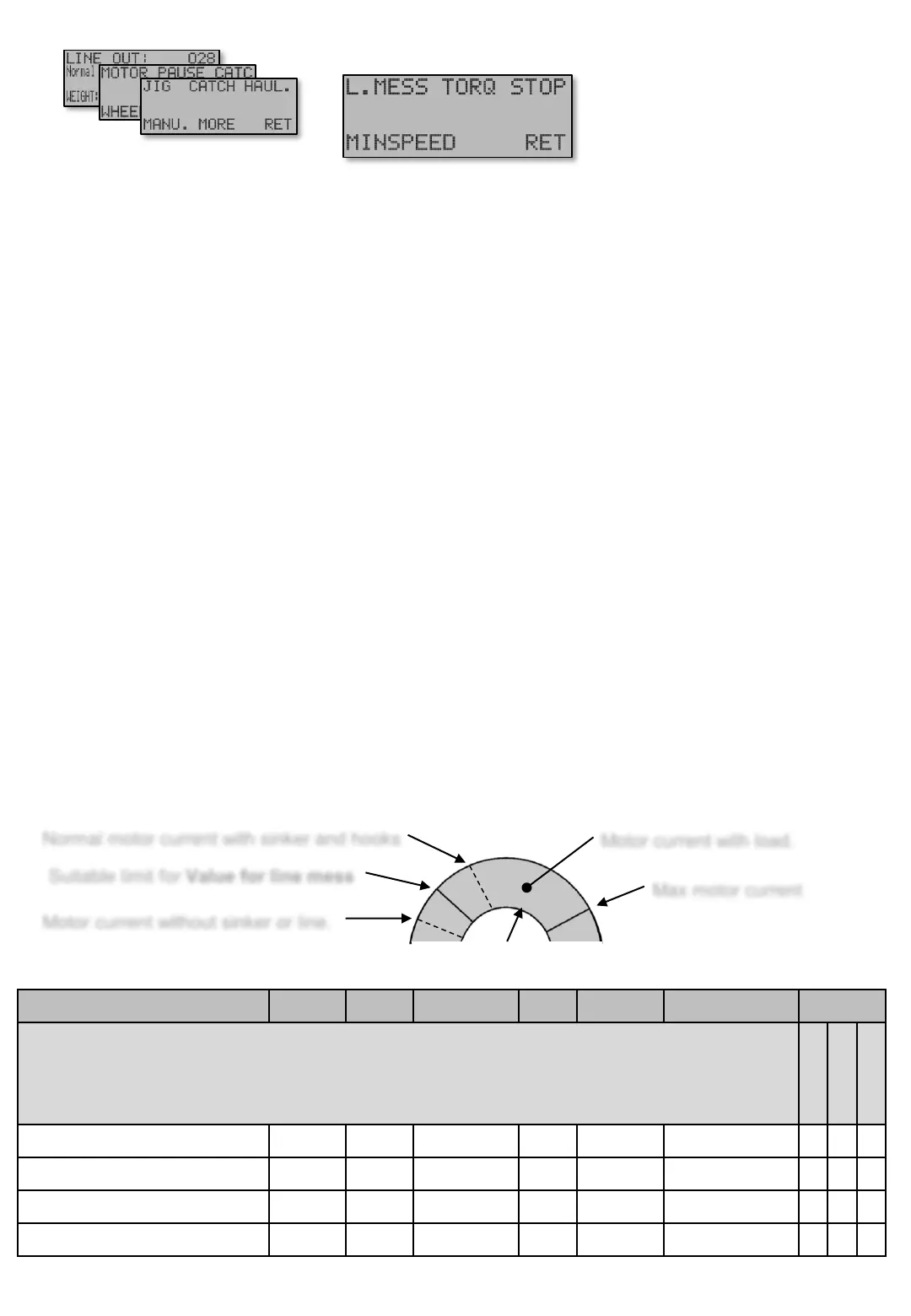
Motor current without sinker or line.
Max motor current
Suitable limit for Value for line mess
Motorcurrent (Weigh)
Normal motor current with sinker and hooks
Motor current with load.
Menu MOTOR MORE [E15] reached
by pressing [E]nter button from
MOTR MENU and contains
advanced motor settings.
”x” =Shows, ” – ” Hidden
Table shows units and value limits. See [E654] for menu detail level setting. Some screens are not visible if simple view, or normal view are Chosen .
Navigate [E1]
General about motor torque. The motor in BJ5000Ex is brushless without gearbox with 50% more
strength and is faster than previous models. Instead of wiping out power in the clutch, the motor torque is
now adjusted to meet desired pulling force. Therefore when the load approaches the set pulling force
(DRAG), the motor and the wheel stops without affecting the pulling force. This minimizes power
consumption. If the catch is tougher and the traction of the motor exceeds, the motor and the wheel are
pulled backwards. The motor then acts as a generator that returns energy to the battery. Only when the
catch pulls so hard that the motor current gets bigger than Ex can handle, the clutch starts to slip.
L.MESS [E151]. Line mess mode (function for line tangle). When two machines tear lines together, one
of them will pick up both machines’ hooks and sinkers, with catch registration as result. The machine
without loads will then go unusually light upwards, and the wheel will not roll out when it’s supposed to.
Unless the line is hauled up in at the same rate as the machine detecting catch, line tangle will occur. Ex
solves this by putting less load on the machine into Catch mode. Note that abnormal low loads may also
be due to catch overcoming the weight of the sinker. To enter lighter Catch mode in this case might be a
good solution.
Speed [E151 P] is the speed used in (Line mess mode). Probably best if set to full speed. As soon as
normal load occurs, the motor returns to Haul up speed [E13 P]. In order for this to work well put Speed
[151 P] to same, or higher then all machines Haul up speed [E13 P] otherwise they will never catch up.
Value for line mess [E151]. This limit should be set to almost (a bit less) same as the motor current
(Showed as Weight) used when motor runs with Sinker and Hooks only. When motor current gets
underneath this limit during the Detect time [E151 PP] the machine gets into Line mess mode.
Detect time [E151 PP]. In order not to change speed too often, giving a rough ride, the average load is
measured during this time.
Distance for line mess [E151 PPP]. When the machine works with Bottom fishing, the first meters
after the bottom detection always goes easy because the sinker is on the bottom and the line slacks.
Therefore, the L.MESS [E151] function is disabled near bottom until this distance is pulled up.
Menu [E15]

 Loading...
Loading...