60
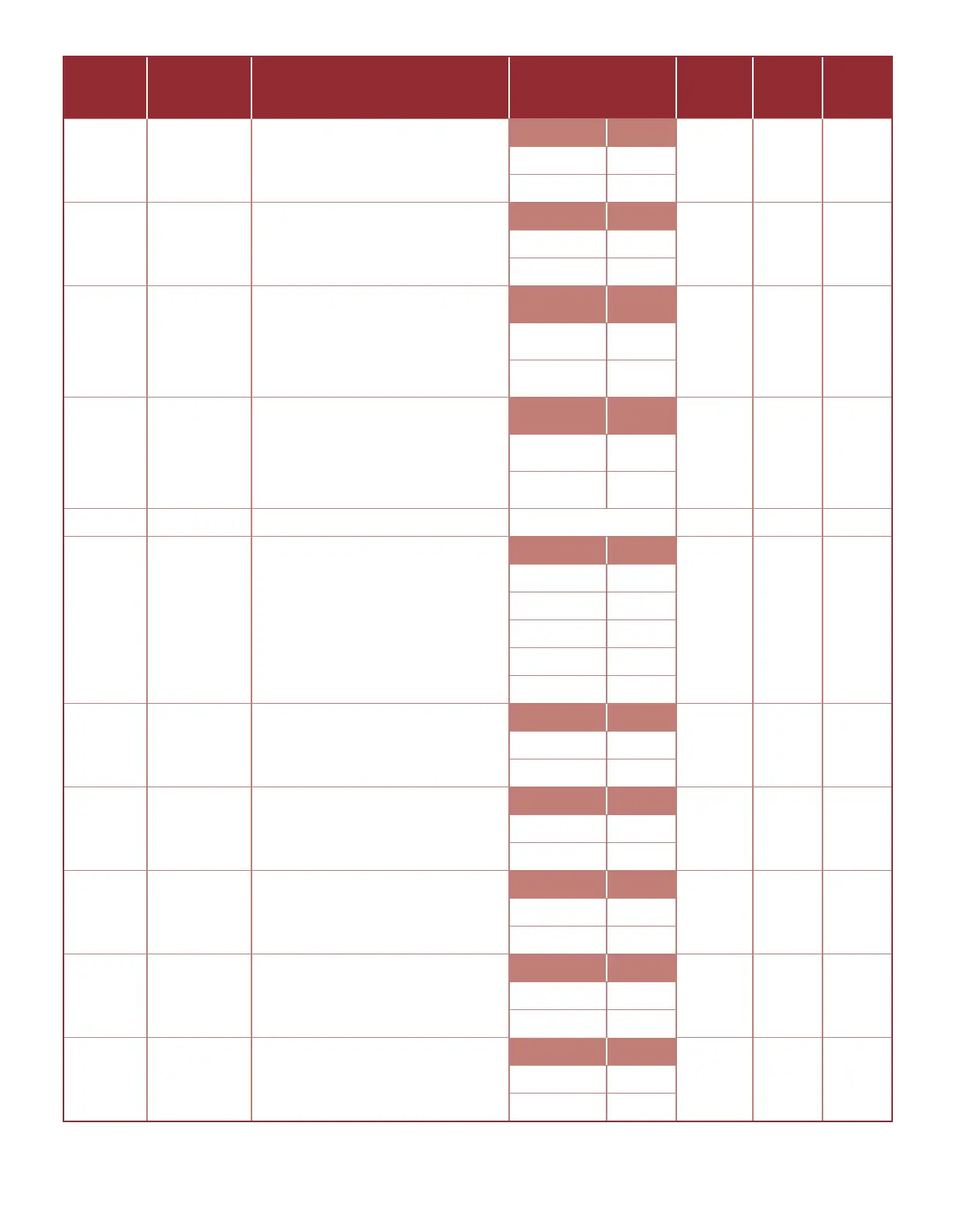
Table 3.5.1 · MODBUS register map - conguraon registers (connued)
REGISTER
NUMBER
NAME DESCRIPTION
OPTIONS and
REGISTER VALUE
DEFAULT
DATA
TYPE
READ
or
WRITE
52
PROCESS IND
HIGH LEVEL
Independent Process upper limit
Range Value
150 INT16 R/WMin -32768
Max 32768
53
PROCESS IND
LOW LEVEL
Independent Process lower limit
Range Value
120 INT16 R/WMin -32768
Max 32768
54
PROCESS IND
CEILING
Upper limit to user adjustable
Independent Process high level
from the Status Menu (Must be
lower than Independent Process
High Level)
Range Value
32767 INT16 R/WMin -32768
Max 32768
55
PROCESS IND
FLOOR
Lower limit to user adjustable
Independent Process low level
from the Status Menu (Must be
higher than Independent Process
Low Level)
Range Value
-32768 INT16 R/WMin -32768
Max 32768
56 - 59 UNUSED Unused N/A R
60 PID SOURCE
Input to be used as the PID process
variable
Source Value
0 UINT16 R/W
Ø (NONE) 0
TC1 1
TC2 2
TC BMS 3
XDCR 4
61
PID
SETPOINT
The value of the PID setpoint
Range Value
0 INT16 R/WMin -32768
Max 32768
62 PID P GAIN
The value of the normalized
proporonal gain in thousandths
(gain range 1 to -1)
Range Value
0 INT16 R/WMin -1000
Max 1000
63 PID I GAIN
The value of the normalized
integral gain in thousandths (gain
range 1 to -1)
Range Value
0 INT16 R/WMin -1000
Max 1000
64 PID D GAIN
The value of the normalized
dierenal gain in thousandths
(gain range 1 to -1)
Range Value
0 UINT16 R/WMin -1000
Max 1000
65
PID
DEADBAND
VALUE
The PID error dead band as a
percentage of the setpoint value
Range Value
0 UINT16 R/WMin -10
Max 10