Menu 6
Parameter
structure
Keypad and
display
Parameter x.00
Parameter
description format
Advanced parameter
descriptions
Serial comms
protocol
Electronic
nameplate
Performance
96 Digitax ST Advanced User Guide
www.controltechniques.com Issue Number: 1
Bits 0-7 and bit 9: sequencing control
When the control word is enabled (Pr 6.43 = 1), and the Auto/manual bit (bit7) are both one, bits 0 to 6 and bit 9 of the control word become active.
The equivalent parameters are not modified by these bits, but become inactive when the equivalent bits in the control word are active. When the bits
are active they replace the functions of the equivalent parameters. For example, if Pr 6.43 = 1 and bit 7 of Pr 6.42 = 1 the drive enable is no longer
controlled by Pr 6.15, but by bit 0 of the control word. If either Pr 6.43 = 0, or bit 7 of Pr 6.42 = 0, the drive enable is controlled by Pr 6.15.
Bit 8: Analog/preset reference
When the control word is enabled (Pr 6.43) bit 8 of the control word becomes active. (Bit 7 of the control word has no effect on this function.) The state
of bit 8 is written to Pr 1.42. With default drive settings this selects analog reference 1 (bit8 = 0) or preset reference 1 (bit8 = 1). If any other drive
parameters are routed to Pr 1.42 the value of Pr 1.42 is undefined.
Bit 12: Trip drive
When the control word is enabled (Pr 6.43) bit 12 of the control word becomes active. (Bit 7 of the control word has no effect on this function.) When
bit 12 is set to one a CL.bit trip is initiated. The trip cannot be cleared until the bit is set to zero
Bit 13: Reset drive
When the control word is enabled (Pr 6.43) bit 13 of the control word becomes active. (Bit 7 of the control word has no effect on this function.) When
bit 13 is changed from 0 to 1 the drive is reset. This bit does not modify the equivalent parameter (Pr 10.33).
Bit 14: Keypad watchdog
When the control word is enabled (Pr 6.43) bit 14 of the control word becomes active. (Bit 7 of the control word has no effect on this function.) A
watchdog is provided for an external keypad or other device where a break in the communication link must be detected. The watchdog system can be
enabled and/or serviced if bit 14 of the control word is changed from zero to one with the control word enabled. Once the watchdog is enabled it must
be serviced at least once every second or an "SCL" trip occurs. The watchdog is disabled when an "SCL" trip occurs, and so it must be re-enabled
when the trip is reset. It should be noted that when data is transferred from a SMARTCARD to the drive there may be a delay of up to 1.5s for the
comms to respond. Once the comms starts to respond again normally the watchdog will not time out for a further 2s even if it is not serviced. This
period is allowed for the system connected to the comms port to recover if required and to begin servicing the watchdog again.
The drive can operate from either a high voltage supply or a low voltage DC supply, usually from a battery. Different methods are used to connect the
low voltage battery supply depending on the frame size of the drive. This parameter, which indicates which supply is active, is set up to the correct
value just as the UV trip is reset. A low voltage DC supply should not be used without first consulting the appropriate documentation on the power and
control connections required for this mode.
0: Normal high voltage supply
The drive is operating in normal high voltage supply mode.
The drive is using the main power terminals to derive its control supplies. The drive will operate normally. Parameters that are saved at power-down
are saved when the supply is removed and a UV trip occurs.
1: Low voltage battery supply
The drive is operating in low voltage DC mode.
The drive is using the low voltage auxiliary power input to derive the power circuit supplies (i.e. gate drives, fans, etc.). The main power terminals can
be connected to a different supply of any voltage up to the maximum normal supply level. All parameters voltage based parameters are calculated
from the auxiliary supply level and not the supply from the main power terminals. If the auxiliary supply and the main supply a
re different then these
parameters will not be correct. Parameters that are saved at power-down are not saved when the power is removed in this mode.
24V must also be supplied via the 24V control board power supply input. The drive will operate normally except that mains loss detection is disabled,
the braking IGBT will only operate when the drive is enabled, and the voltage levels contained in the following table are used instead of the normal
high voltage levels whatever the voltage rating of the drive.
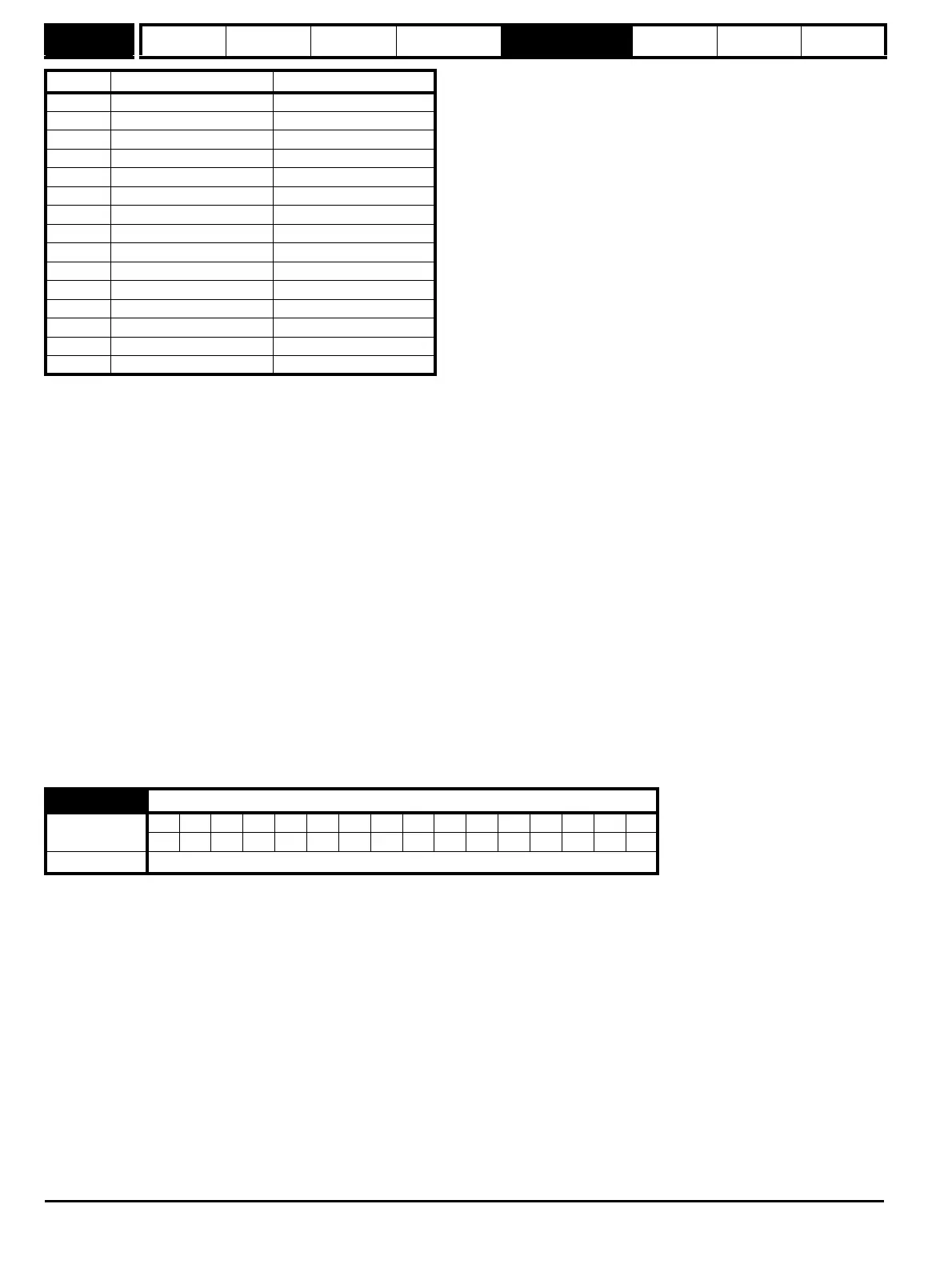
Bit Function Equivalent parameter
0 Drive enable Pr 6.15
1 Run forward Pr 6.30
2Jog Pr 6.31
3 Run reverse Pr 6.32
4 Forward/reverse Pr 6.33
5Run Pr 6.34
6Not stop Pr 6.39
7 Auto/manual
8 Analog/Preset reference Pr 1.42
9 Jog reverse Pr 6.37
10 Reserved
11 Reserved
12 Trip drive
13 Reset drive Pr 10.33
14 Keypad watchdog
6.44 Active supply
Coding
Bit SP FI DE TE VM DP ND RA NC NV PT US RW BU PS
1111
Update rate Background write