FC 300 Design Guide
How to Program
5-60 Termin al 27 Pul s e Output V ariable
Option:
*
No operation [0]
MCO co nt rolled [51]
Output frequency [100]
Reference [101]
Feedback [102]
Motor curre nt [103]
To rque relative to limit [104]
To rque relative to rated [105]
Power [106]
Speed [107]
Torque [108]
Function:
Selects the variable for the chosen readout
on terminal 29. It is not possible to set t
he
parameter while the motor is running.
5-62 Pulse Output Maximum Frequency #27
Range:
0 - 32000 Hz
*
5000Hz
Function:
Sets the maximum frequency on terminal 27
referring to output variable in par.
5-60. It
isnotpossibletosettheparameterwhile
the motor is running.
5-63 Termin al 29 Pul s e Output V ariable
Option:
*
No operation [0]
MCO co nt rolled [51]
Output frequency [100]
Reference [101]
Feedback [102]
Motor curre nt [103]
To rque relative to limit [104]
Torq ue relative to rated [105]
Power [106]
Speed [107]
Torq ue [10 8]
Function:
Selects the variable for the ch osen readout
on terminal 29 . It is not possible to set the
parameter while the motor is running.
5-65 Pulse Output Maximum Freque ncy #29
Range:
0 - 32000 Hz
*
5000Hz
Function:
Sets the maximum frequency on terminal 29
referring to output variable in par. 5-63. It
is not possible to set the parameter while
the motor is running.
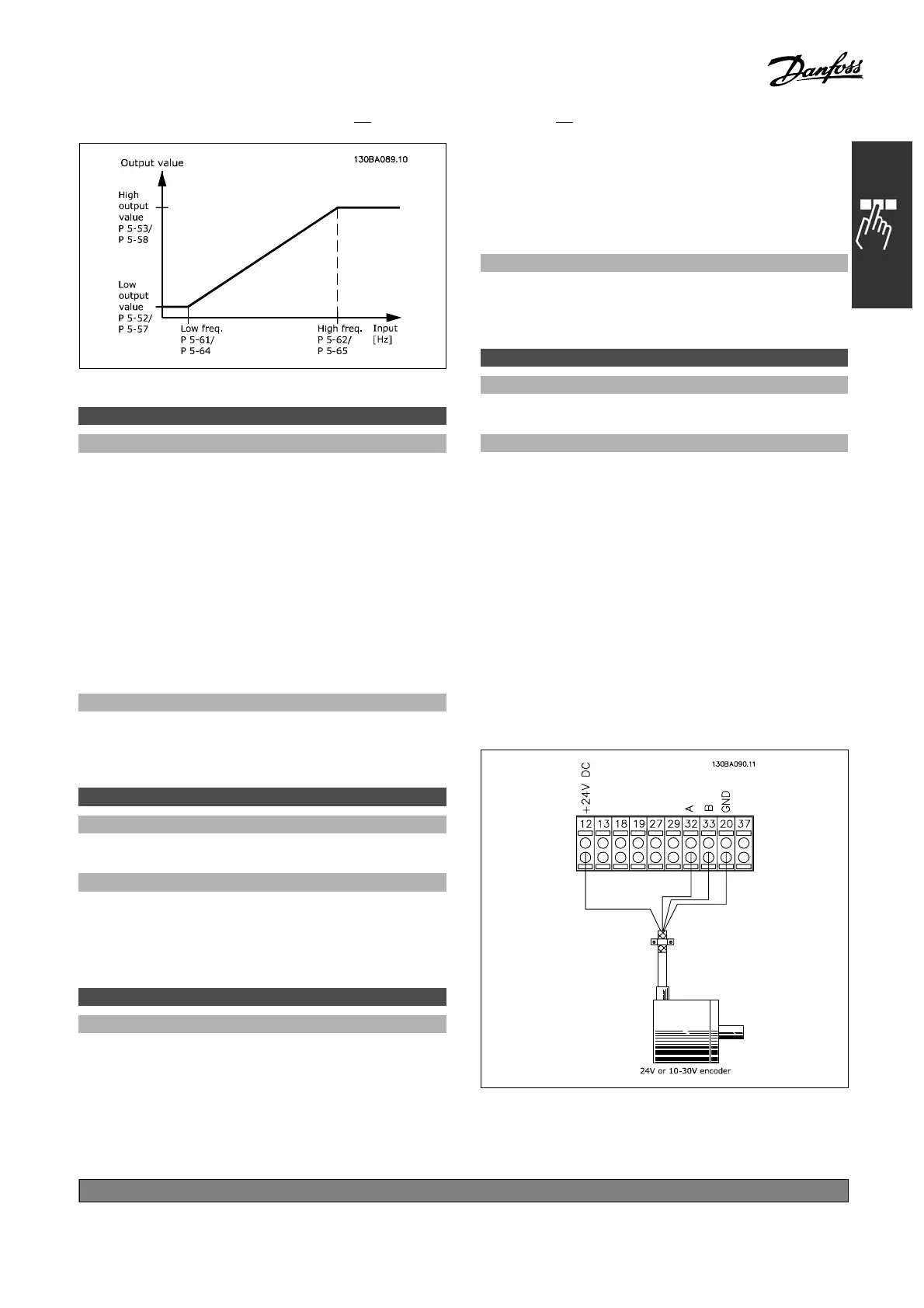
" 5-7* 24 V Encoder Input
You can connect a 2 4 V encoder to terminal 13 (24
V DC supply), terminal 32 (Channel A), terminal 33
(Channel B), and terminal 20 (GND). The digital
inputs 32/33 are active for e ncoder inputs wh en
you select Flux w/ encoder feedback (par. 1-01).
The encoder used is a dual channel (A and B) 24
V type. Max input frequency: 110 kHz.
*
default setting ()display text []value for use in communication via serial communication port
173
MG.33.B
3.22 - VLT is a registered Danfoss trademark
 Loading...
Loading...















