FC 300 Design Guide
How to Program
Select Initialization [2] to reset all parameter
values to default setting, (except par. 15-0 3,
15-04, and 1 5-05). The drive resets during the
next power-up. The parameter also resets to
default setting Normal operation [0].
14-25 Trip Delay at Torque Limit
Option:
0-60s
*
60 s
Function:
When the adjustable f re quency drive registers
that the out put torque has reached the t orque
limits (par. 4-16 and 4-17) a warning is shown.
If this warning is conti nuously present as long
as specified in this parameter, the adjustable
frequency drive trips. The feature is d isabled by
setting the parameter to 60 s = OFF. However,
the thermal VLT monitoring is still a ctive.
" 14-3* Current Limit Ctrl.
The FC 300 Series features an integral current limit
regulator which is activated when the motor current,
and thus the torque, is higher than the torque limits
set in par. 4 -16 and 4-17. When the drive is at the
current limit during motor operation or regenerative
operation,theadjustablefrequencydrivewilltry
to get below the preset torque limits as quic kly as
possible without losing control of the motor.
While the current regulator is active, the adjustable
frequency drive can only be stopped using any
digital input set to Coast inverse [2] or Coast and
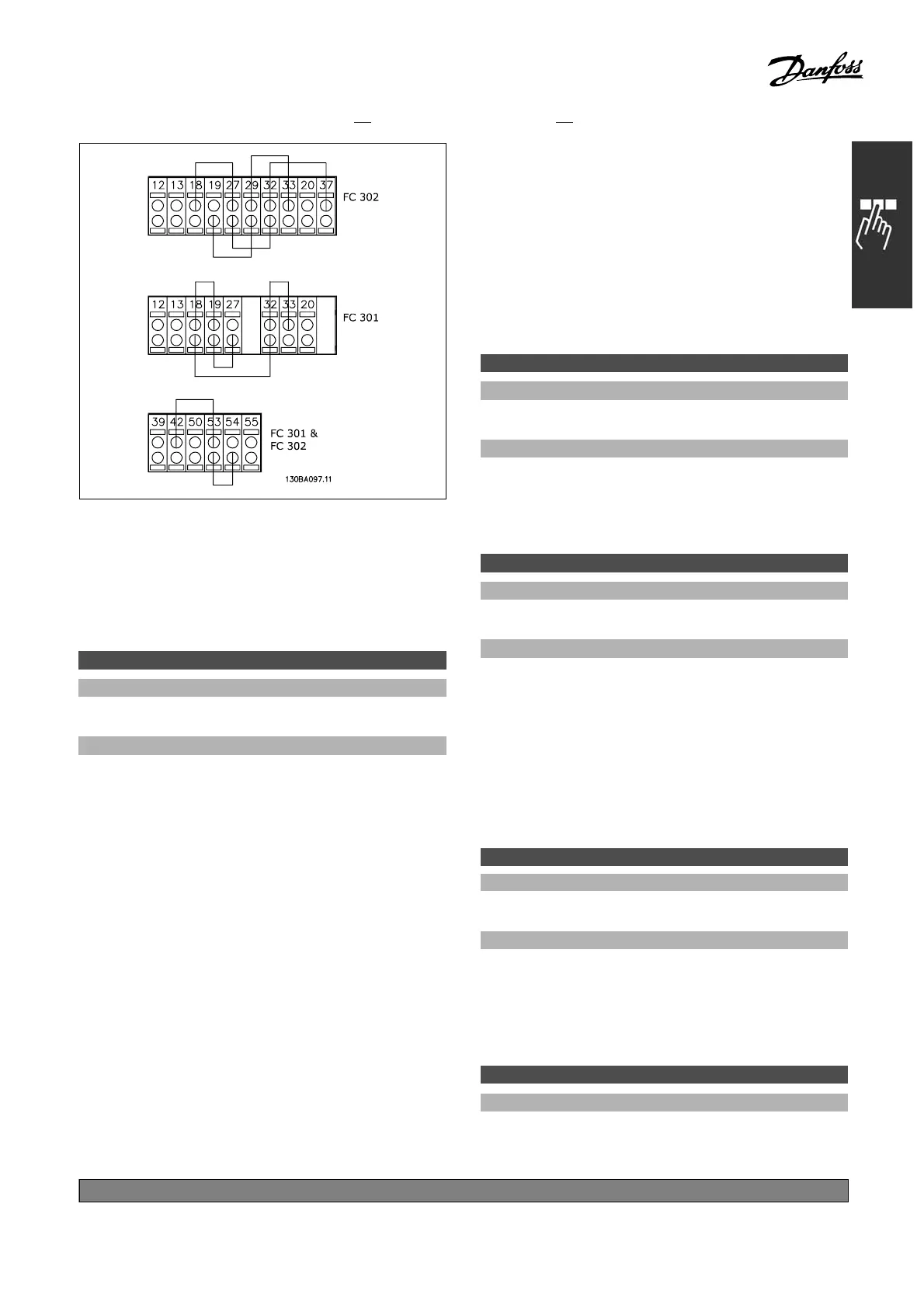
reset inv. [3]. Any signal on terminals 18 to 33
will not be active until the adjustable frequency
drive is no longer near the current limit.
By using a digital input set to Coast inverse [2] or
Coast and reset inv. [3], the motor does not use
the ramp-down time, since the d rive is coaste d.
If a quick stop is necessary, use the mechanical
brake control function along with an external
electromechanical brake atta ched to the application.
14-30 Current Lim Cont, Proportional Gain
Option:
0-500%
*
100 %
Function:
Controls the proportional gain of the current
limit controlle r. Setting it to a high er value
makes it react faster. A setting too high
leads to controller instability.
14-31 Current Lim Contr, Integration Time
Option:
0.002 - 2.000 s
*
0.020 s
Function:
Controls the current limit controller integration time.
Setting it to a lower value makes it react faster. A
setting too low leads to controller instability.
" 14-4* Energy Optimizing
This group contains parameters for a djusting
the energy optimization level in both
Variable Torque (VT) and Automatic Energy
Optimization (AEO) mode.
14-40 VT Level
Range:
40 - 90%
*
66%
Function:
Sets the level of motor magnetization at low speed.
A low value res ults in less energy loss in the mo
tor.
Note that the consequence is reduced load capability.
Par. 14-40 cannot be adjusted while the
motor is running.
14-41 AEO Minimum M agnetization
Range:
40 - 75%
*
40%
*
default setting ()display text []value for use in communication via serial communication port
207
MG.33.B
3.22 - VLT is a registered Danfoss trademark
 Loading...
Loading...















