152
152
152
152
: Sampling time, duration of a time slice
: Integral time: by means of this time, the influence of the integral part is controlled on the
manipulated variable, also known as integral-action time
: Loop error at the time n
: Loop error at the time n-1; etc.
:Loop error at the beginning of the calculations
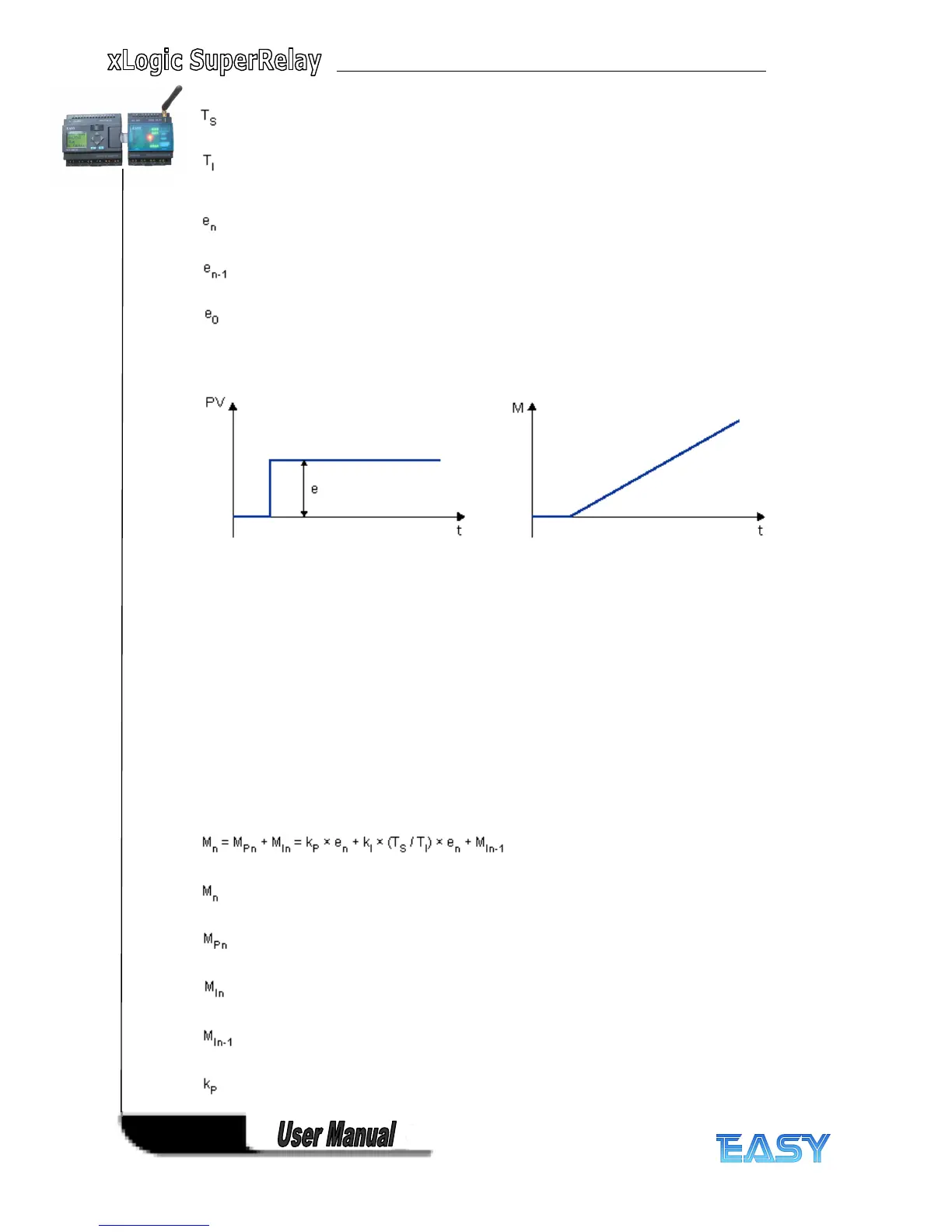
The following picture shows a jump in process value and step response of the controller:
Summary
The I controller has the following characteristics:
It sets the process value exactly to the command variable.
By so doing, it tends to oscillate and is unstable.
It requires more time to carry out the control action than the P controller .
PI controller
A PI controller reduces the loop error immediately and will eventually drive the loop error to
zero.
: Manipulated variable at the time n
:Proportional part of the manipulated variable
:Integral part of the manipulated variable
:Manipulated variable of the I controller at the time n-1; also called integral sum
:Gain of the P controller