Mentor MP Short Form Guide 93
Issue Number: 5 www.controltechniques.com
Safety Information Product information
Mechanical
installation
Electrical
installation
Getting started Running the motor
SMARTCARD
operation
Advanced
parameters
Diagnostics UL listing
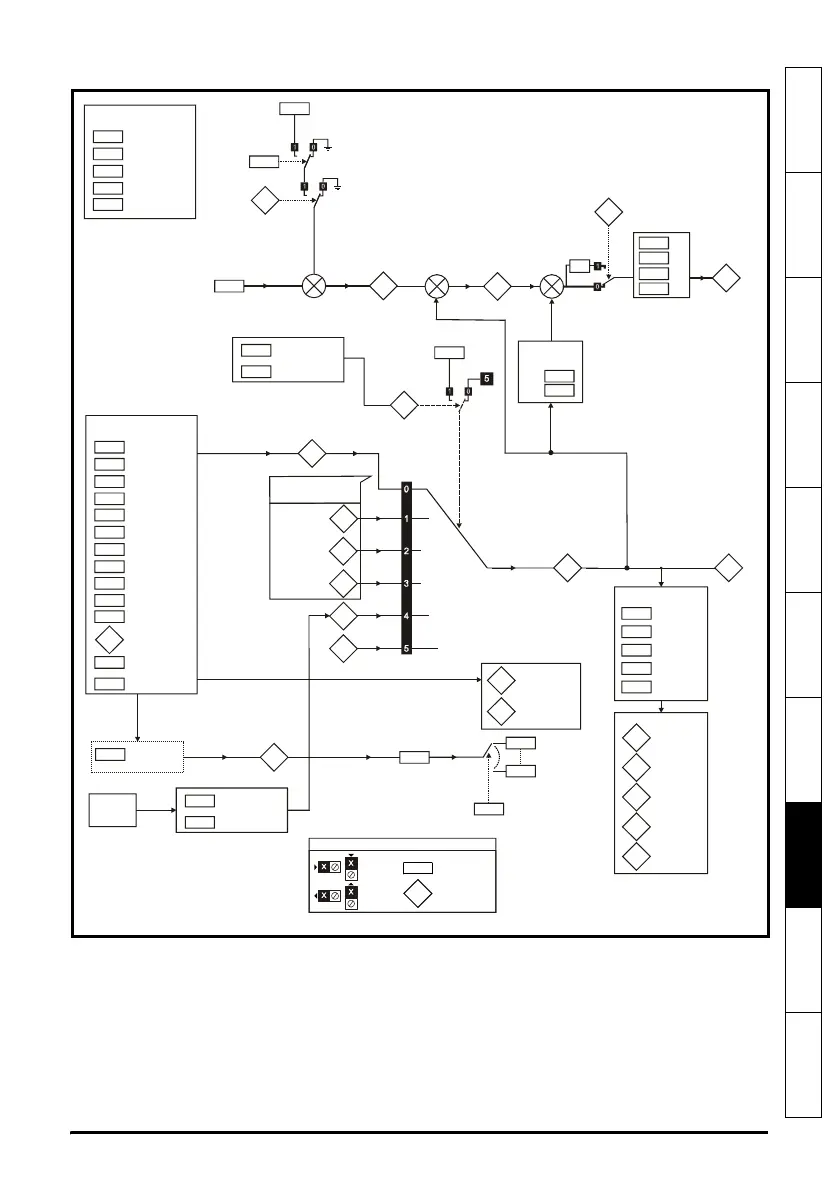
Figure 8-3 Menu 3 logic diagram
* If Pr 5.28 (Field weakening compensation disable) is set to ‘OFF (0)’ a multiplication factor is
applied to the speed loop gains when the flux is below 100%.
3.35
Drive encoder marker
mode
3.36
Drive encoder
supply voltage
3.38
Drive encoder type
3.39
Drive encoder
termination select
Encoder interface
15.03
Speed feedback
from option
module in slot 1
16.03
17.03
Speed feedback
from option
module in slot 2
Speed feedback
from option
module in slot 3
Feedback from the
option modules set-up
in Menus 15, 16 and 17
3.27
Drive encoder
speed feedback
selector
3.43
Maximum drive
encoder
reference (rpm)
3.31
Drive encoder marker
position reset disable
3.32
Drive encoder marker
flag
3.33
Drive encoder turns
3.34
Drive encoder lines
per revolution
3.47
Re-initialise position
feedback
Position feedback
initialised
3.49
Full motor object
electronic nameplate
transfer
3.54
Encoder direction
3.40
Drive encoder error
detection level
3.42
Drive encoder filter
3.48
Drive encoder
reference
destination
Speed feedback
percentage
(RW)
parameter
Read-only (RO)
parameter
Input
terminals
Output
terminals
The parameters are all shown at their default settings
+
Final speed
reference
+
3.23
1.11
Hard speed
reference
selector
Reference
enabled
indicator
3.22
Hard speed
reference
3.21
Damping factor
Speed controller set-up
3.16
Speed controller gain
select
3.17
Speed controller
set-up method
3.18
Motor and load
inertia
3.20
Bandwidth
3.03
Speed
error
differential
feedback gains
(Kd1)
3.55
Select estimated
speed on feedback
loss
3.56
Speed feedback
loss window
3.57
Estimated speed
has been
automatically
selected
3.26
5.86

 Loading...
Loading...

