Setup & Operation 14. I/O Remote Settings
VT Rev.1 101
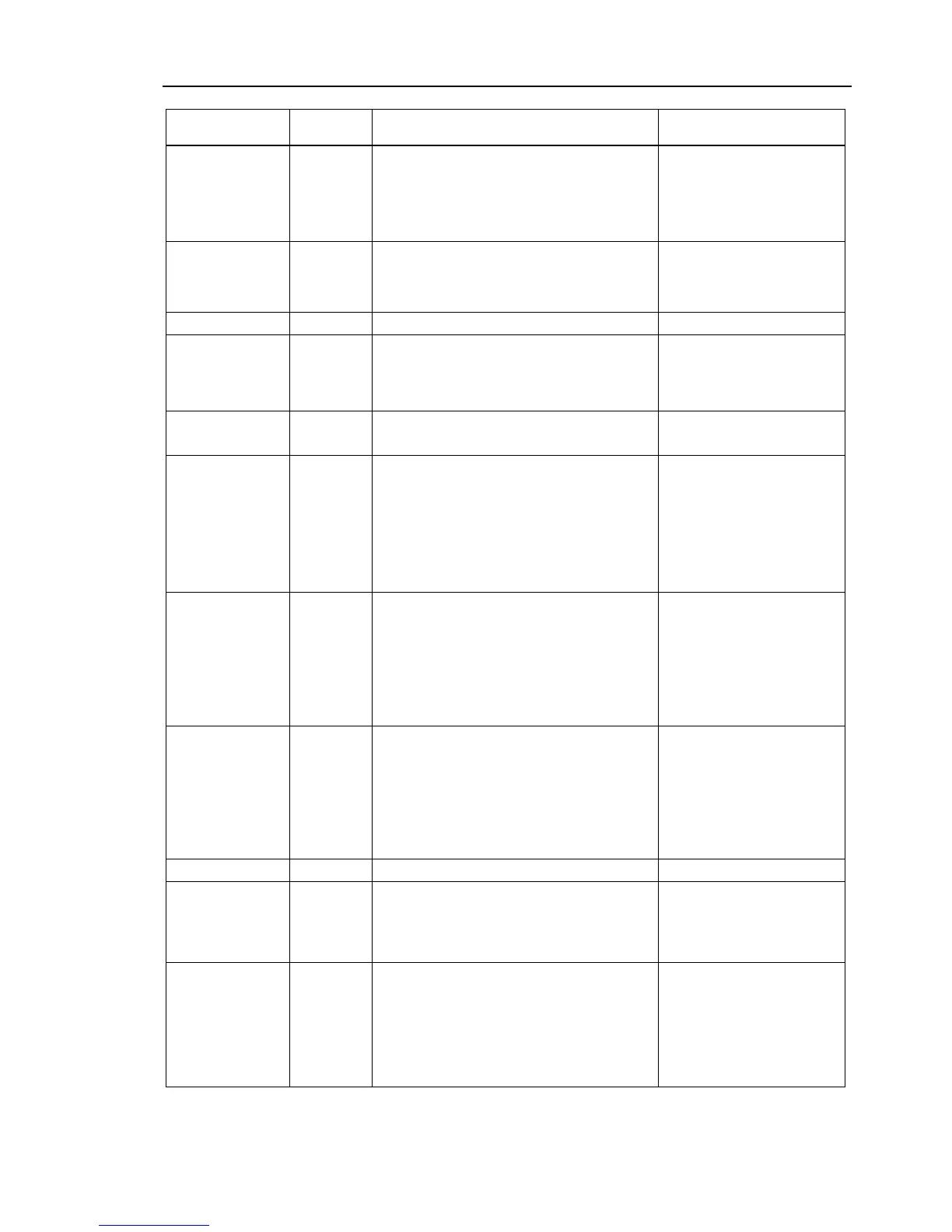
Name Initial Description
Input Acceptance
Condition
SelRobot2
SelRobot4
SelRobot8
Not set
Specify the number of manipulator which
executes a command. (*5)
SetMotorsOn
Not set
Turn ON manipulator motors. (*5) (*6)
EStopOn output OFF
SafeguardOn output OFF
Turn OFF manipulator motors.
SetPowerHigh
Not set
Set the manipulator power mode to High
(*5)
EStopOn output OFF
SafeguardOn output OFF
SetPowerLow
Not set
Set the manipulator power mode to Low.
Move the manipulator Arm to the home
position defined by the user.
Error output OFF
EStopOn output OFF
SafeguardOn output OFF
MotorsOn output ON
Pause input OFF
MCal
Not set Execute MCal (*5) (*7)
Error output OFF
EStopOn output OFF
SafeguardOn output OFF
MotorsOn output ON
Pause input OFF
Recover
Not set
After the safeguard is closed, recover to the
position where the safeguard is open.
Error output OFF
EStopOn output OFF
SafeguardOn output OFF
RecoverReqd output ON
Pause input OFF
Not Set Specify the alarm number to cancel (*10)
Input signal for alive monitoring of the
manipulator. Same signal as the input
will be output to ALIVE output. The
monitoring of the manipulator by switching
the input periodically and checking the
output signal.
(*1) “AutoMode output” ON is omitted from the table. This is an input acceptance condition for all
functions.