Maintenance 13. Joint #5
208 VT Rev.1
the timing belt through the motor pulley and loosely
to the Arm #4.
Hexagon socket head cap bolts: 3-M4×20
(with slotted hole washer)
Make sure that the gear grooves of the timing belt are fit
into those
of the pulley completely.
When securing the motor unit loosely, make sure that the
motor unit
can be moved by hand and it does not tilt when
If the unit is secured too loose or too tight,
The direction to install the motor is the direction
in which the connector of the motor faces
Be careful for the
installation direction
Apply proper tension to the motor unit and
Joint #5 timing belt tension: 23 - 36 N
Belt tension meter setting values
Weight: 2.5g/mm width×m span
Width: 6.0mm
Span: 184mm
Hexagon socket head cap bolts: 3-M4×20 (with slotted hole washer)
Tightening torque: 4.0 ± 0.2 N·m
Jumping (position gap) may occur if the value is below the lower limit.
Vibration (abnormal noise) or reduction in life of the parts may occur if the value
exceeds the upper
When you replace with a new belt, belt extends and the belt tension may decrease in
the initial stage.
Make sure to operate the robot two to three days and check the belt
tension again
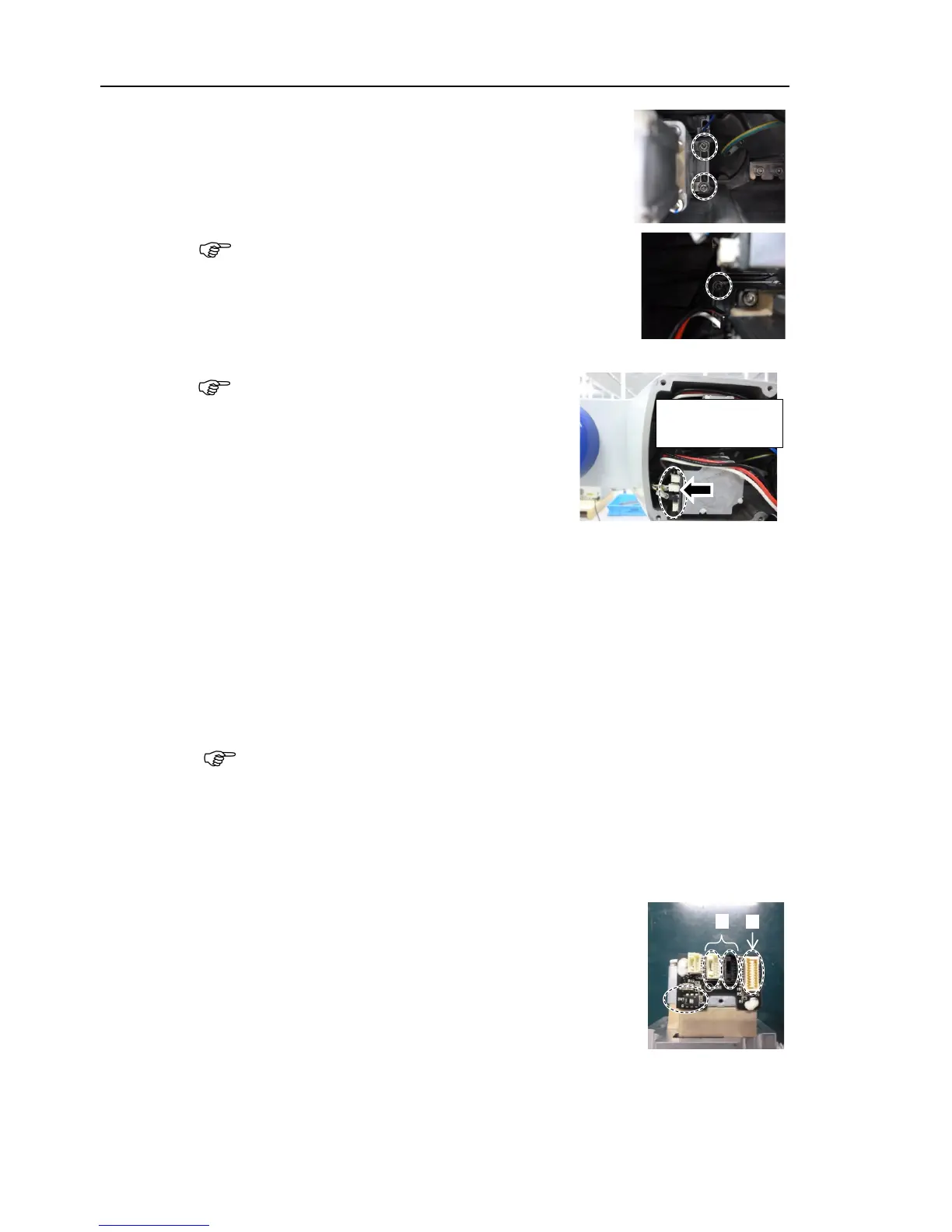
the following connectors of the motor.
A: Signal cable connectors (for motor × 2)
B: Signal cable connector (for AMP board)
the signal cable connector (for motor) is the