Operation & Software Manual
130
Direct Drives & Systems
Chapter C: System functions ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05
POS.1+=300000 Relative movement: The motor moves in the positive direction of 300000
increments with respect to its actual position.
POS.1-=300000 Relative movement: The motor moves in the negative direction of 300000
increments with respect to its actual position.
12.10.4 Rotary S-Curve movement
When a rotary movement type is selected, it is also necessary to define the rotation way with parameter K209
(CW or CCW) and the controller position counter's limit value with parameter K27 (refer to §12.4.1
).
Note: These parameters are also used for advanced rotary movements types (refer to §13.3
if you are
an advanced use).
12.10.4.1Rotation way (parameter K209)
Caution: The following condition must be met so that a rotary motor works correctly:
12.10.4.2Position counter's limits (parameter K27)
A maximum limit is required for the position counter (refer to §12.4.1
). For a rotary motor revolving at constant
speed:
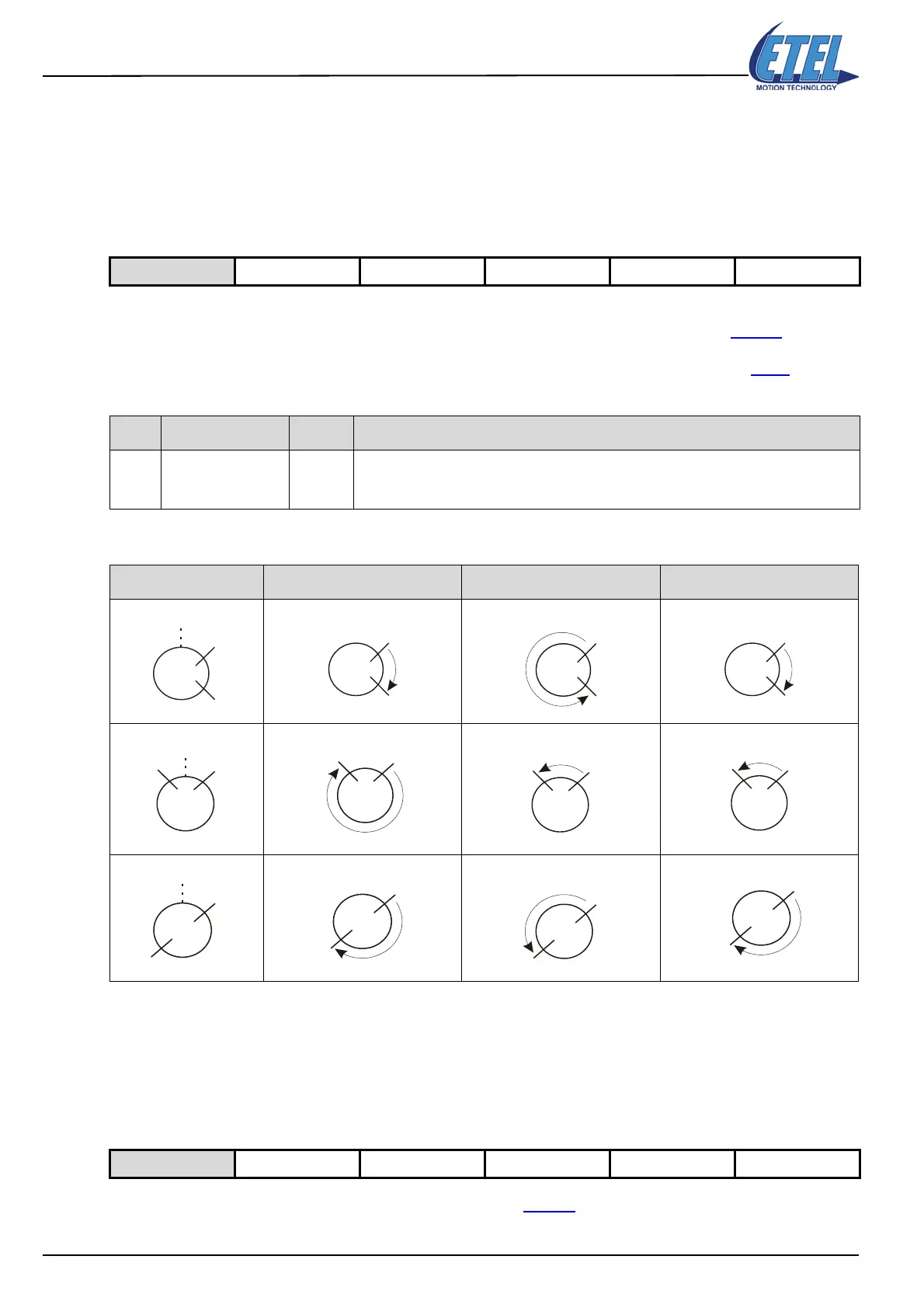
Available on DSC2P DSC2V DSCDP DSCDL DSCDM
K Name Value Comment
K209
Rotation way
selection
0
1
2
Positive (CW) rotary movement
Negative (CCW) rotary movement
Shortest way to reach the target (CW or CCW)
K209 = 0 Positive (CW) K209 = 1 Negative (CCW) K209 = 2 Shortest (CW or CCW)
Available on DSC2P DSC2V DSCDP DSCDL DSCDM
start
end
Pos 0
start
end
Pos 0
start
end
Pos 0
K211
2
2 K212⋅
--------------------
2
30
2 K27⋅()–< with
K211: speed; SPD alias command
K212 : acceleration; ACC alias command