Operation & Software Manual
84
Direct Drives & Systems
Chapter C: System functions ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05
12.2 Motor
The parameters described here are set only once and are normally automatically set with ETEL Tools (see §8.)
Motor type (parameter K240):
This parameter is only used for unit calculation by ETEL Tools program and by DLL libraries (if used). If the
values of this parameter is not correct, the motor will correctly work but the curves will not be displayed correctly
in the units given by the ETEL Tools program (meter, amp, etc.)
Remark: Monitoring M240 indicates the type of motor given either by parameter K240 or the EnDat 2.1
encoder (depending on the encoder type selection (parameter K79)).
Number of motor's phases and switching (parameter K89):
Tells the controller the number of motor phases. There is no difference for the user if one, two or three phase
motor is used. The meaning of each parameters is unchanged, commands are the same, etc.
For especially high inductance motors, a specific switching may be selected with parameter K89 = 11, 21 or 31.
Remark: Parameter K89 is only read when the controller is switched on. This parameter must be saved
with the SAV command when it is changed and then the controller must be switched off and on to
integrate this new data. If this new value is incorrect, the K89 BAD VALUE error (M64=41) will
appear.
Number of motor's pairs of poles (parameter K54):
Is used with rotary motors. Parameter K54 shows the number of pair of motor's magnetic poles; this parameter
is used by the motor commutation look-up table (LKT). The sinusoidal currents sent in the motor phases are
calculated by the current reference generator, with the LKT (refer also to §12.7.1.4
). With linear motors, K54=1.
Motor phase and force inversion (parameter K56):
It enables the permutation by software of the connection of the motor phases as well as the sign of the motor
force. If the phases have been inverted during the installation, any initialization will give a totally wrong
parameter K53 (refer to §12.7.1.4
). The AUT command allows the automatic calculation of the adequate value
for parameter K56.
Remark: If you manually set K56 and K52=1, it is required to perform an AUT command after, to tune K53.
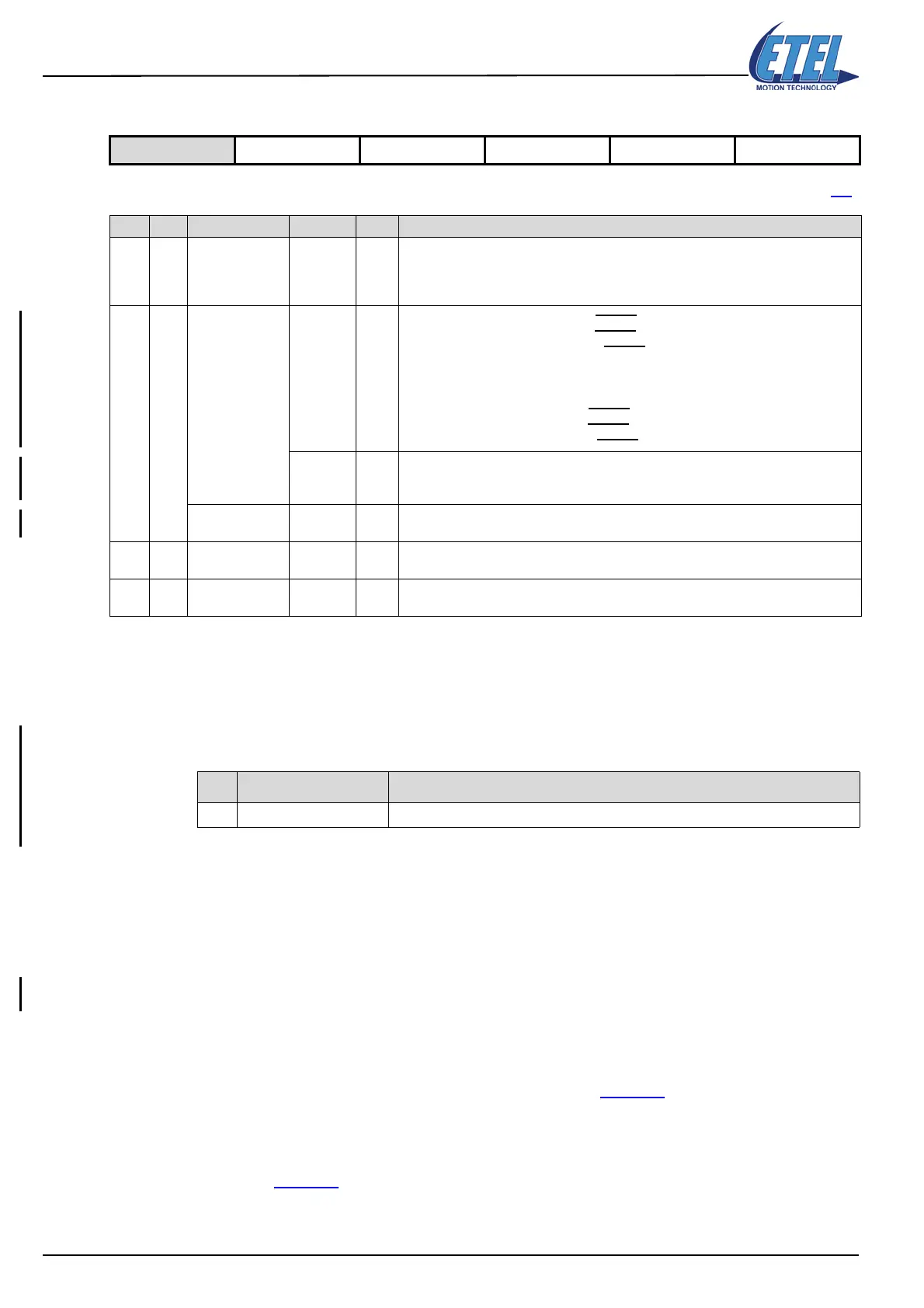
Available on DSC2P DSC2V DSCDP DSCDL DSCDM
K Alias Name Controller Value Comment
K240 - Motor type -
0
1
Linear motor.
Rotary motor.
Depth 0 for primary encoder and depth 1 for secondary encoder (depth 1 is ONLY
available on DSC2P and DSC2V)
K89 -
Motor phase
number and
PWM type
selection
DSC2P
DSC2V
10
20
30
11
21
31
14
24
34
One-phase motor, PWM at 24kHz (DSC2V
)
Two-phase motor, PWM at 24kHz (DSC2V
)
Three-phase motor, PWM at 24kHz (DSC2V
)
One-phase motor, PWM at 12kHz
Two-phase motor, PWM at 12kHz
Three-phase motor, PWM at 12kHz
One-phase motor, PWM at 6kHz (DSC2P
)
Two-phase motor, PWM at 6kHz (DSC2P
)
Three-phase motor, PWM at 6kHz (DSC2P
)
DSCDP
DSCDM
10
20
30
One-phase motor, PWM at 18kHz
Two-phase motor, PWM at 18kHz
Three-phase motor, PWM at 18kHz
Motor phase
number
DSCDL
10
20
One-phase motor
Two-phase motor
K54 -
Pairs of poles of
the motor
--For linear motors: K54=1
K56 -
Motor phase and
force inversion
-
0
1
Normal.
Inverts phases and force signs.
M Name Comments
M240 Motor type Gives the type of motor connected to the position controller