ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05 Chapter C: System functions
Operation & Software Manual
Direct Drives & Systems 163
K161.1 = 512 ;the movement will start when DIN10 = I (bit# 9, value 512) and DIN1 = 0
K162.1 = 3 ;3 = (1 + 2) means that the outputs DOUT1(=1, bit# 0) and DOUT2(=2, bit# 1) will be
modified when a STI command is executed.
K163.1 =2 ;the status will be DOUT1=0, DOUT2=I (bit# 1, value 2).
K164 = 6000 ;time-out of 1 sec. (for DSC2P/DSC2V) and 3 sec. (for DSCDP,DSCDL and DSCDM)
.........
STI.1 = 1,1
.........
13.3.6 Concatenated movements: MMC command
If two POS commands follow each other, the movements are made one after the other, so that the first must
be finished before the second starts. However, some applications need to change the final position (x
final
) to
reach during a movement. The MMC command (Movement Mode Concatenated), which is an alias of
parameter K201, allows to realize this function and even more, since also speed and acceleration can be
changed during the movement.
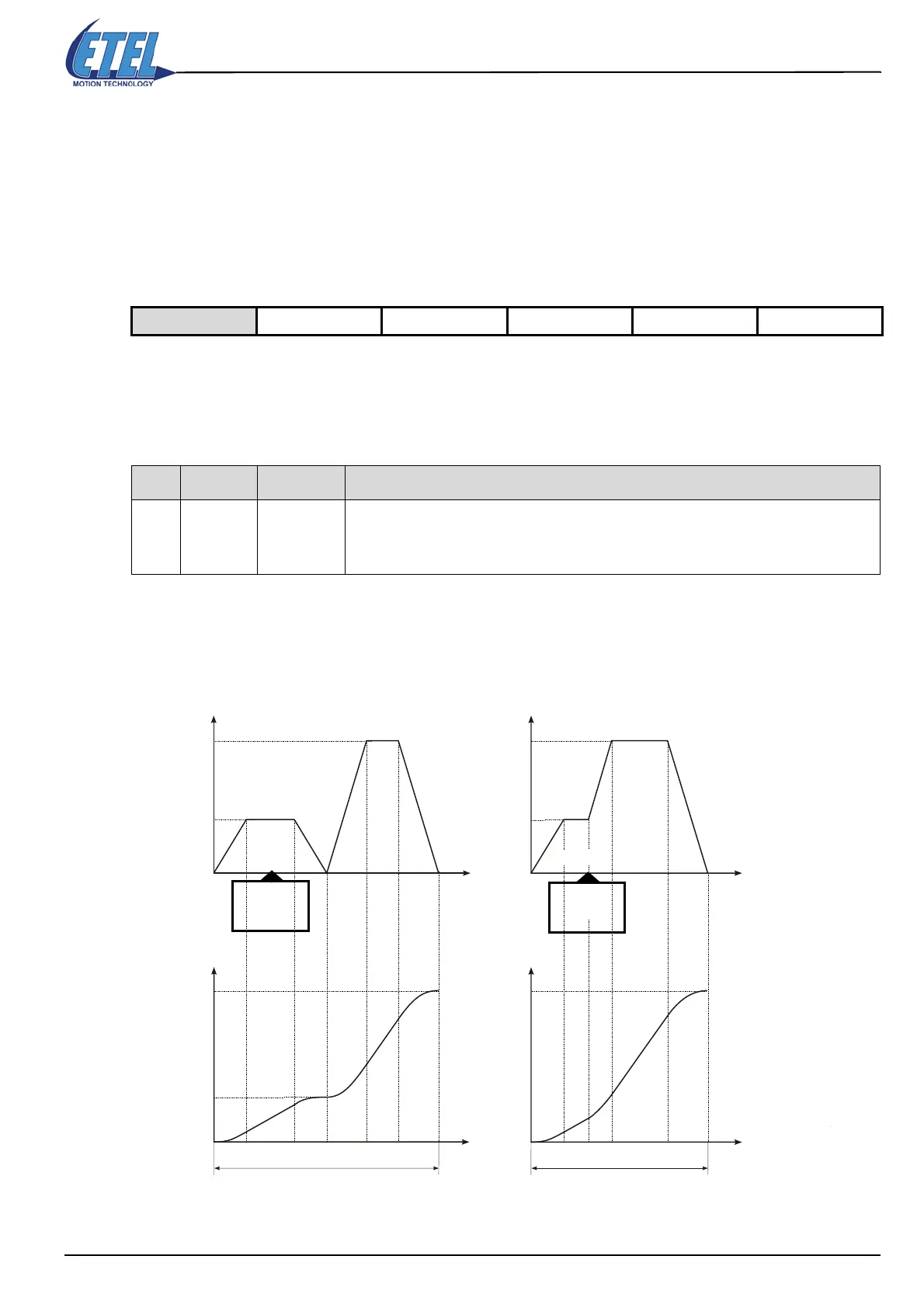
When concatenated movements mode is selected (MMC.1=1), and a second movement starts, the controller
immediately calculates the new speed trajectory and the motor switches from one movement to the other
without going through the 0 speed. The first movement does not end and the controller immediately considers
the new position, the new maximum speed and the new maximum acceleration.
Remark: For the same final position, times t
1
and t
2
are not identical; time t
2
is shorter.
Available on DSC2P DSC2V DSCDP DSCDL DSCDM
K Alias <p1> Comment
K201 MMC
0
1
2
3
Concatenated movements disabled
Concatenated movements for MMD=1, 17 & 24
Infinite back and forth movement for MMD=3, 10, 19 & 26
One back and forth movement. for MMD=3, 10, 19 & 26
tt
tt
t
1
t
2
MMC.1=0 MMC.1=1
Speed Speed
V
max2
V
max1
V
max2
V
max1
1
st
movement
1
st
movement
2
nd
movement
2
nd
movement
reception of
the new
references
reception of
the new
references
Position Position
X
2
X
2
X
1