Operation & Software Manual
150
Direct Drives & Systems
Chapter C: System functions ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05
13.3 Advanced movements
Here are the advanced movements usable in standard reference mode (K61 = 1).
13.3.1 Movements types
Advanced movement types are:
• Look-up table (refer to §4.
) movement
• Calculated movement with predefined profile
• Rotary look-up table movement
• Rotary infinite movement
• Rotary calculated movement with predefined profile
Note: S-Curve and rotary S-curve movements have been explained in §12.10
, as basic movements.
13.3.1.1 Movements definition
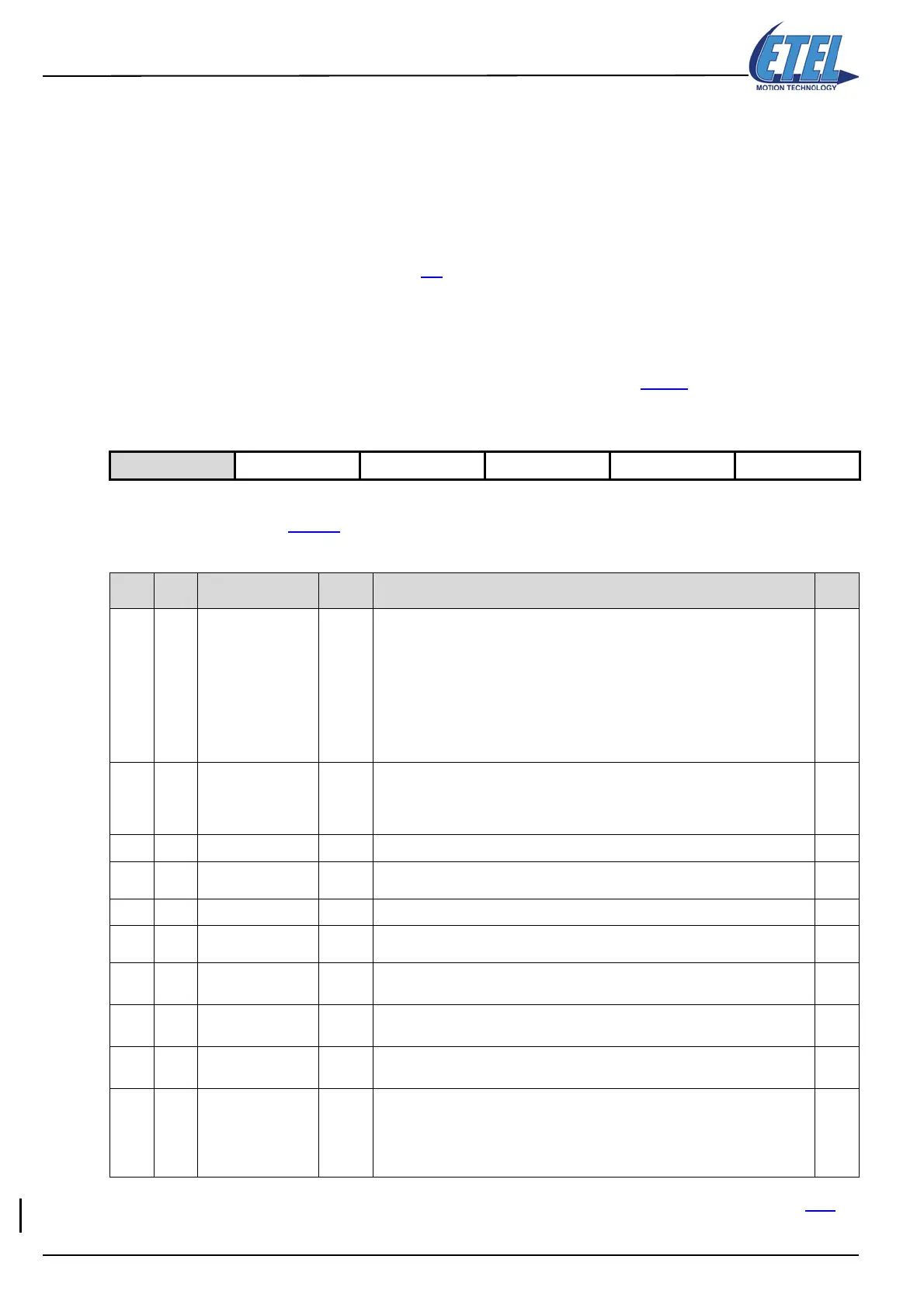
All parameters allowing the definition of advanced movements are summarized below. Detailed explanations
are given from paragraph §13.3.2
.
Some of the following parameters are available via alias commands.
Remark: LTI and CAM alias use the same syntax than their corresponding parameter K. Refer to §6.3
for
more information about the syntax and the possible operators.
Available on DSC2P DSC2V DSCDP DSCDL DSCDM
K Alias Name Value Comment Units
K202 MMD Movement type
1
3
10
17
19
24
26
S-curve (jerk time) movement
Calculated movement with predefined profile. Parameter
K230 gives the profile
and parameter K229 the time.
Look-up table movement (sti)
Rotary S-curve (sti) movement
Rotary calculated mvt. with predefined profile. Parameter K230 gives the profile
and parameter K229 the time.
infinite rotary movement
Rotary look-up table movement
-
K201 MMC
Concatenated
movements
selection
0
1
2
3
Concatenated movements disabled
Concatenated movements for MMD=1 & 17
Infinite back and forth movement for MMD=3, 10, 19 & 26
One back and forth movement. for MMD=3, 10, 19 & 26
-
K203 LTN Number of the LKT 0-7 Number of the user look-up table movement selected. -
K204 LTI
Execution time of
LKT movement
- Time to execute a look-up table movement [sti]
K205 CAM Cam value - Cam value (in percent). Stretches the time scale -
K206 -
Quick stop acc.
pre-programmed
- Brake acceleration used with BRK and HLB commands.
[uai]
[ruai]
K207 -
LKT starting and end
positions
0
1
Starting and end position are different (target defined by POS command)
Starting and end position are the same (amplitude defined by parameter K208)
-
K208 -
LKT movement max.
stroke
- Max. stroke for LKT movement with K207=1 and MMD=10 and 26 [upi]
K229 -
Calculated
movement time
Execution time of the movement selected by parameter K230. Time = K229 x
166.67 µs or K229 x 500 µs
[sti]
K230 -
Calculated
movement profile
0
1
2
3
Predefined profiles for MMD=3 or 19
Triangular (speed) movement
S-Curve (full jerk) movement
Sine modified (Cam) movement
Real sine movement
-