Operation & Software Manual
74
Direct Drives & Systems
Chapter B: System setup & tuning ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05
9.2.2 Position regulator
Note: Refer to §13.1.2.1 for the position regulator's K values.
9.2.2.1 PID gains
The position feedback is controlled by a state regulator, which can be approximated by a proportional-integral-
derivative (PID) regulator. The position state regulator's parameters are:
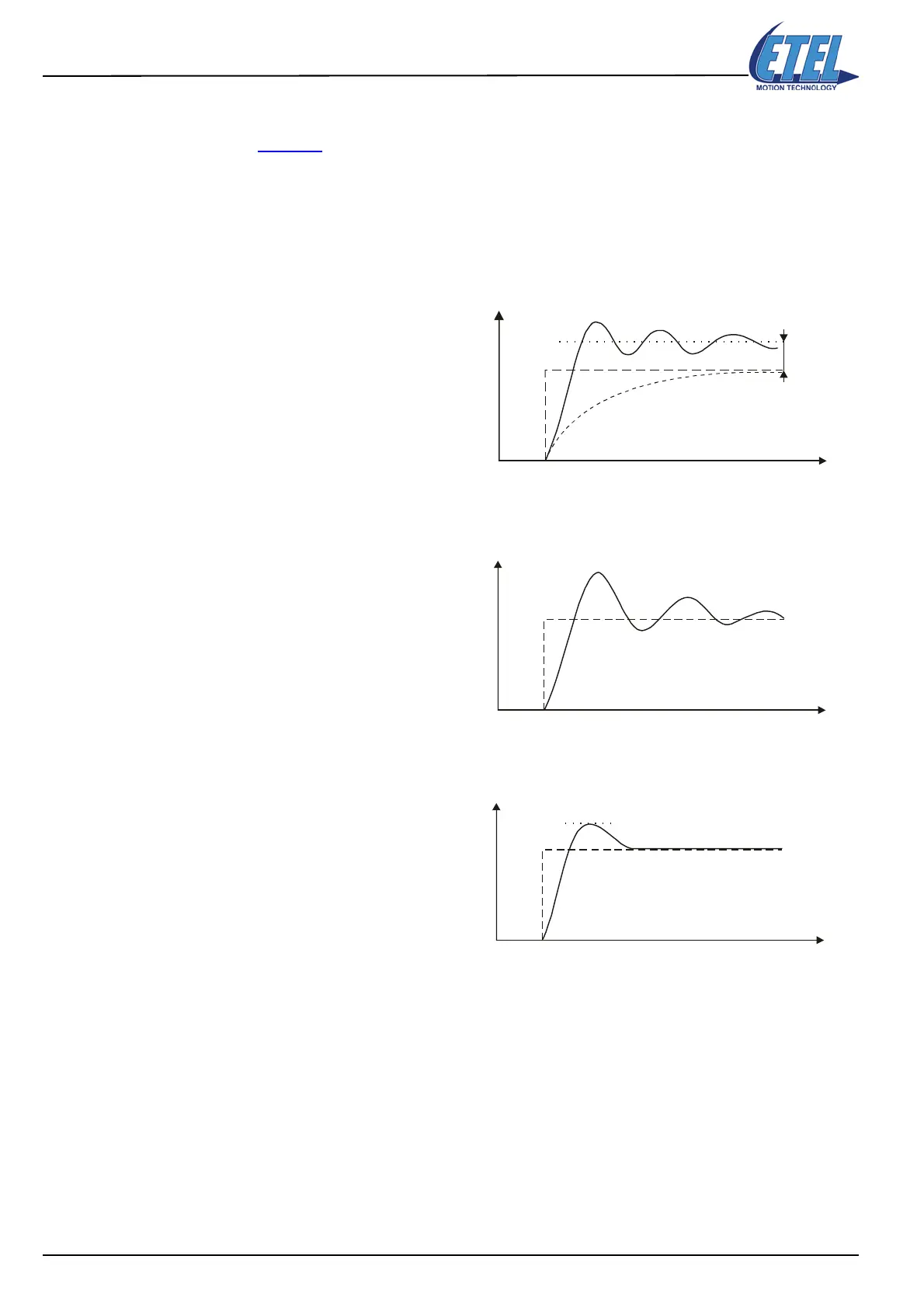
K1: Proportional gain (P).
The main effect of parameter K1 is to make the
position response faster, but it may also create
an overshoot, oscillations and a permanent
error.
Position error : Xe = Xc - X
K4: Integral gain (I).
The main effect of parameter K4 is to suppress
the position permanent error (Xe constant).
K2: Speed feedback gain, or pseudo-derivative
gain (D). This is not a real position derivative
gain, since the input to K2 is not directly
stemmed from the position error (Xe), but
derived from the calculated speed (V).
The main effect of parameter K2 is to reduce
(suppress) the overshoot and the low-frequency
oscillations.
Position
reference
step Xc
X (K1 low)
X (K1 effect)
Time
perm. error
Xe constant
Position
Xc
X (K4 effect)
Time
Position
Xc
overshoot 5% max
Time
X (K2 effect)