ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05 Chapter C: System functions
Operation & Software Manual
Direct Drives & Systems 153
The LTI value is limited to 1500000 for the DSC2P/DSC2V and to 500000 for DSCDP, DSCDL and DSCDM
for technical reasons. This means that it is not possible to realize look-up table movements of more than
166,67µs·1500000 = 250s for the DSC2P/DSCD2V or more than 500µs·500000 = 250s for the DSCDP,
DSCDL and DSCDM.
It is also possible to use the CAM command (refer to §13.3.7
) to increase the duration of look-up table
movements, but it is not possible to increase the time over 250s whatever the controller.
Caution: The reader must be aware that the shorter time t
movement
is, the bigger speed and acceleration
become.
Once the LKT are programmed into the controller, you can use them as explained below:
LTN.x = y ;y: # of the look-up table to use.
LTI.x = y ;y: execution time of the LKT in [sti].
K207.x = y ;y: 0 to a normal LKT and 1 to a LKT with the begin and the end at the same place.
K208.x = y ;y: amplitude of the movement in user increments (when K207=1)
POS.x = y ;y: not taken into account, only starts the LKT movement
STA/STI.x = y, k ;y: value in a depth to start a movement
;k: mask of bit(s)
Example:
The following example shows how to realize a look-up table movement with a total movement of 200000
increments in 2.5s.
MMD.1=10 ;Select the look-up table movement.
LTN.1=3 ;Select the look-up table movement (LKT 3 is user-defined).
LTI.1=15000 ;The movement duration is: 15000 x 166,67µs = 2.5s for the DSC2P/DSC2V and
15000 x 500µs = 7.5s for the DSCDP, DSCDL and DSCDM.
POS.1=200000 ;The motor moves by following the trajectory (defined in LKT 3) to the position
200000 and reaches this position 2.5s after leaving.
13.3.2.4 Rotary look-up table movement
This movement type works like a ’Rotary S-curve’ type but it executes look-up table type movements.
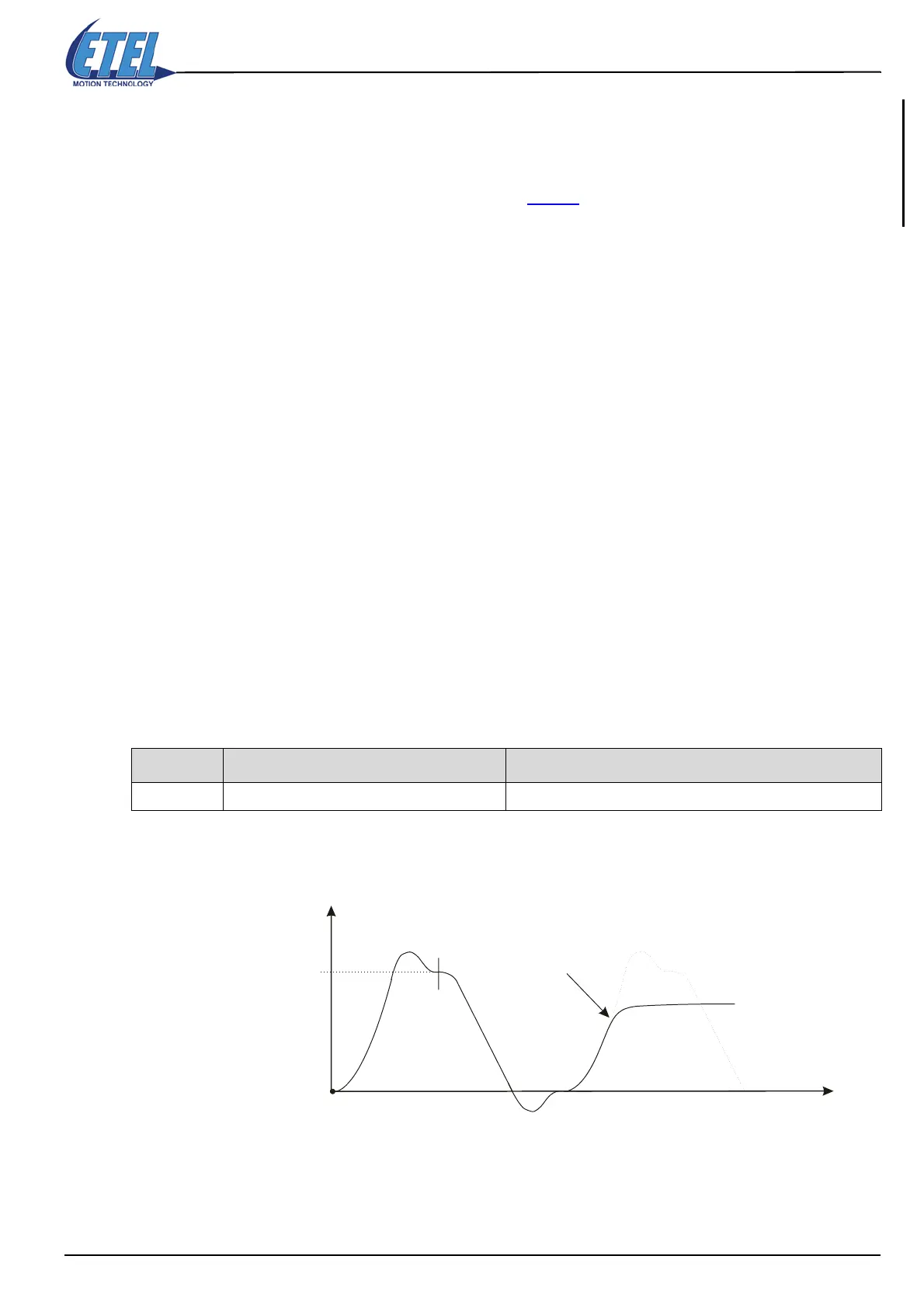
Look-up table movements may be concatenated with MMC=2 or 3. Example:
Remark: The example above is also valid for MMD=10 (linear look-up table movement).
To stop a concatenated look-up table movement, use a STP or BRK command.
The POS command will also stop the movement at the nearest start or end point of the LKT.
MMD.x Type of movement Uses functions
26 Rotary look-up table movement POS, K27, K209, K203, K204, K206, K207, K208, MMC
execution of the
BRK command
end of first movement
begin of first movement