ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05 Chapter E: Appendixes
Operation & Software Manual
Direct Drives & Systems 311
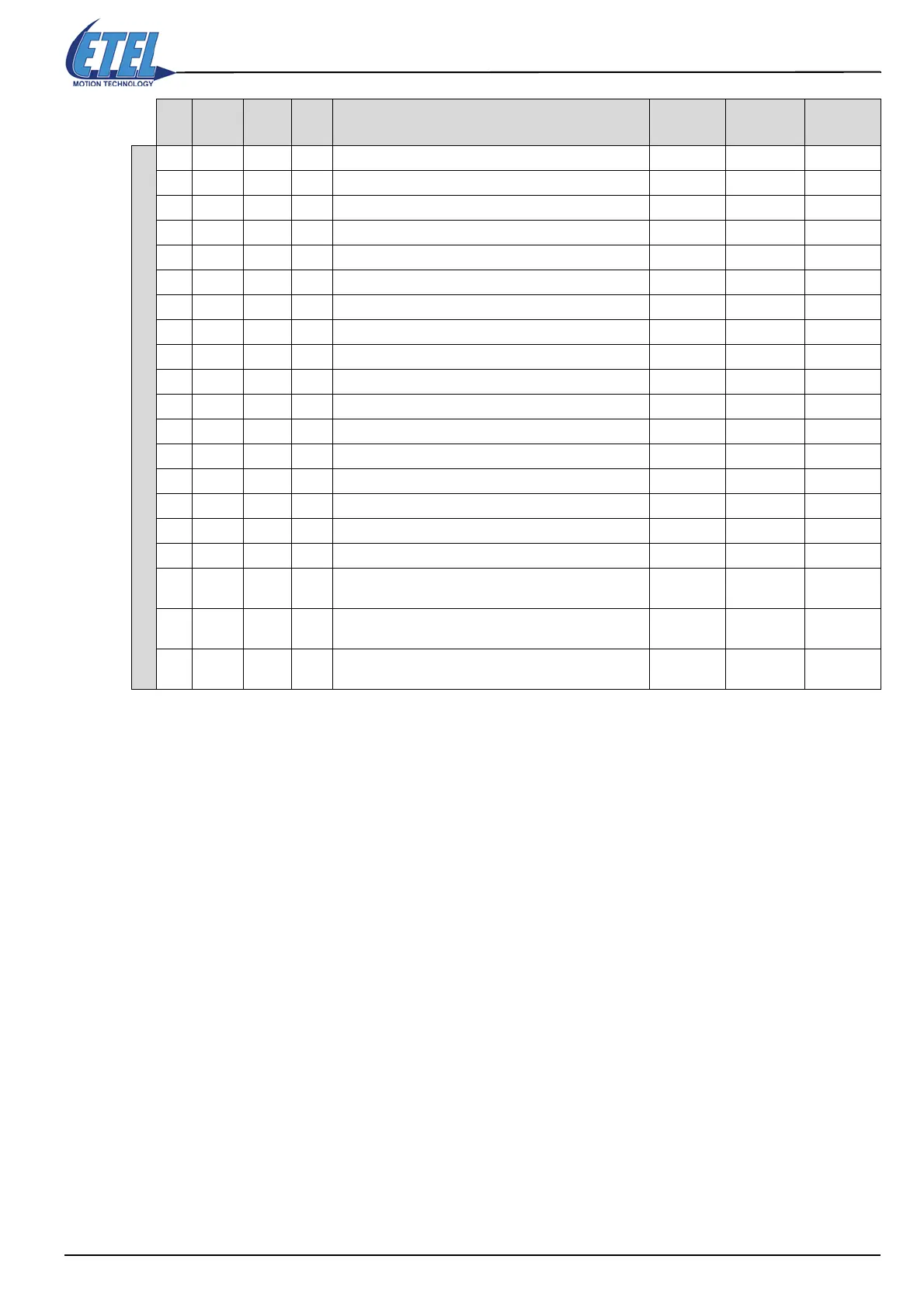
DSCDM parameters
K213 JRT Jerk time 0 0 500
K219 TEB real-time slave to master monitoring pointer 0 -2147483648 2147483647
K220 Control source type 1 1 3
1 Source type is a user's variable X
2 Source type is a parameter K
3 Source type is a monitoring M
K221 Control source index 0 0 255
K222 Control source shift factor 0 0 16
K223 Control source offset 0 -2147483648 2147483647
K224 Control source gain 8388608 -2147483648 2147483647
K229 Execution time of the movement selected by K230 10000 4 500000
K230 Movement type selection for MMD = 3 or 19 0 0 3
0 Triangular speed movement
1 S-curve (full jerk) movement
2 Sine modified movement
3 Real sine movement
K240 Motor type. 0: linear motor, 1:rotary motor 0 0 1
K241
Encoder period in [nm] for linear encoder or number of
period for rotary encoder
1 -2147483648 2147483647
K242
Position multiplication factor (is used by the DLL to
calculate the position unit with indirect encoder)
1 1 2147483647
K243
Position division factor (is used by the DLL to calculate
the position unit with indirect encoder)
1 1 2147483647
K Alias
Val
<P1>
Bit #
<P1>
Comment for parameters K
and <P1> of the DSCDM
Def. Val
<P1>
Min. Val
<P1>
Max. Val
<P1>