Operation & Software Manual
330
Direct Drives & Systems
Chapter E: Appendixes ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05
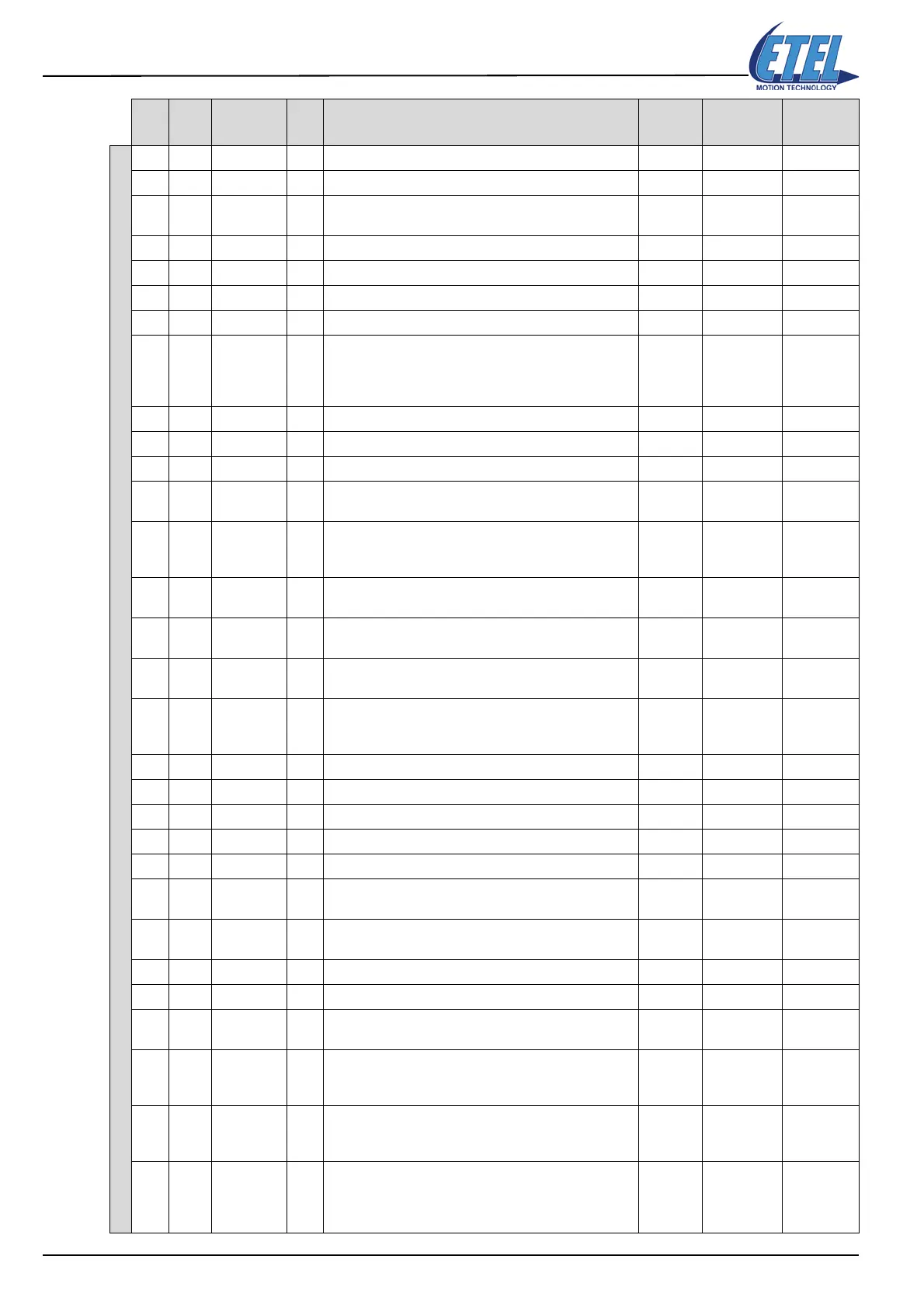
DSCDL monitorings
524288 19 Bit present, always 1
1048576 20 The motor is executing a trajectory
2097152 21
This bit is set when the motor is in the position/time
window defined by K38 and K39
8388608 23 The controller is in warning mode
16777216 24 The controller is executing an internal sequence
67108864 26 The controller is in error mode
134217728 27 Trace busy flag is set during a register trace acquisition
1073741824 30
Position captured according to the digital input (see
K182/K178/K179). This bit is set when the conditions on
the digital input allow the capture of the position. It is
reset when 1 is written in K182
M64 Gives the error code 0 0 255
2 The current measured in phase 1 is greater than K83
3 The current measured in phase 2 is greater than K83
4
This occurs when M67 becomes greater than K85. This
is a power protection (of the motor and/or the controller)
5
The temperature of the controller is greater than 70°C.
This is measured by a thermostat mounted on the heat
sink
6
The absolute value of the power voltage (Vpower) in volt
is greater than K149/100
8
Error that occurs when the +5V of the controller
becomes lower than 4.5V
9
The absolute value of the power voltage (Vpower) in volt
is lower than K147/100
10
Error in offset of current measurement. The offset
measured if greater than 8% of the maximum current of
the controller (M82)
13 The temperature sensor does not respond
16 The EnDat calculated position is too big. Decrease K77
17 Zero position of the EnDat encoder not found
18 Error on CRC from the EnDat
19 Error during the reading position of EnDat
20
The amplitudes of the analog encoder signals are too
small
21
The encoder has lost the position acquisition, the
frequency is too high
23 The tracking position error is greater than K30
24 The velocity is greater than K31
26
Error when power on with DIN1 is equal to 0 when K33 =
0
29
The temperature of the motor is too high, measured by
temperature sensor connected to digital input according
to K141
30
The controller generates this error when the controller
reaches a limit switch during a movement (except during
IND and SLS), if bit #0 of K32 is set
33
Error when the same label is defined several times. If the
error appears, checks the sequence and if it is correct,
erases sequence (NEW.#=1 command) and then
download again the sequence
M Alias Values
Bit #
<P1>
Comment for monitorings M
and <P1> of the DSCDL
Def. Val
<P1>
Min. Val
<P1>
Max. Val
<P1>