X20/X20S and Ethos v1.5.0 User Manual
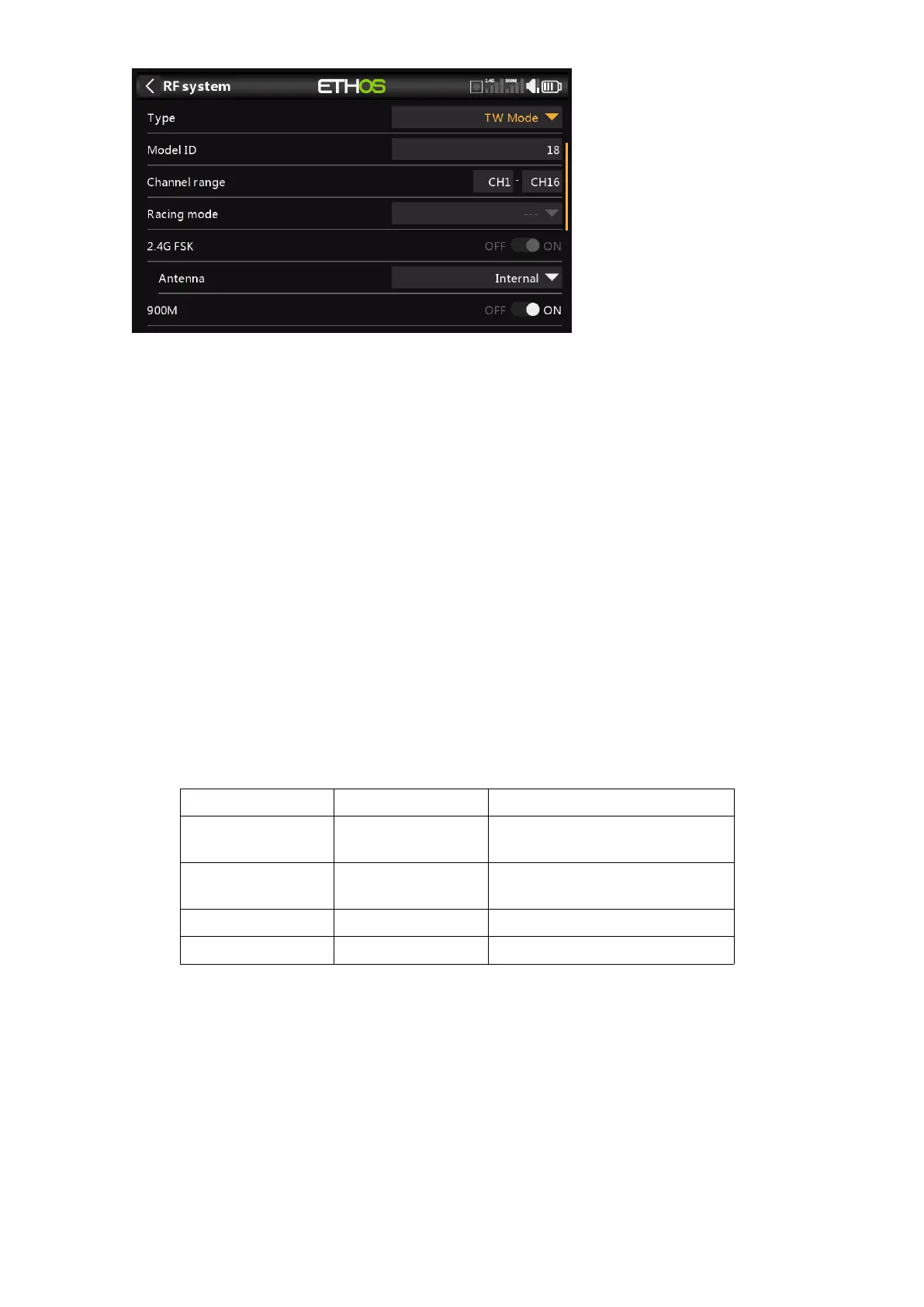
Having selected the TW mode, the following parameters must be set up:
Model ID
When you create a new model, the Model ID is automatically allocated. The Model ID
must be a unique number because the Smart Match function ensures that only the
correct Model ID will be bound to. This number is sent to the receiver during binding,
so that it will then only respond to the number it was bound to. Receiver matching is
still as important as ever.
The Model ID can be changed manually from 00 to 63, with the default ID being 1.
Note also that the Model ID is changed when the model is cloned.
Channel Range:
Since TW supports up to 24 channels, you normally choose Ch1-8, Ch1-16, or Ch1-24
for the number of channels to be transmitted. Note that Ch1-16 is the default. The
channels received by a receiver is configured in the receiver options for each receiver.
The choice of transmitter channel range also affects the transmitted update rates.
Eight channels are transmitted every 7ms. If using more than 8 channels, then the
channel update rates are as follows:
Channel Range Update Rate Notes
1-24 21ms Ch1-8, then Ch9-16, then
Ch17-24 sent in rotation
1-16 14ms Ch1-8, Ch9-16, sent
alternately
1-8 7ms Ch1-8
Racemode 4ms Digital servos only
Racing mode
Racing mode offers a very low latency of 4ms with receivers like TW MX.
If the Channel Range is set to Ch1-8, it becomes possible to select a source (e.g a
switch) which will enable Race Mode. Once the receiver has been bound (see below),
and Racing mode has been enabled, the receiver must be re-powered for Racing mode
to take effect.
 Loading...
Loading...