5
MAN20001587-01-02/23 (translation of the original operating instructions)
Operating Instructions
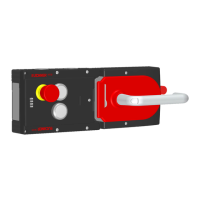
Transponder-Coded Safety Switch CTS-C1-BP/BR-FLX
EN
2. Correct use
Safety switches series CTS-C1-BP/BR-FLX are interlocking devices with guard locking solenoid (type4). The device complies
with the requirements according to EN60947-5-3.
The device can be congured with the aid of a function actuator. Depending on the taught-in function actuator, guard lock
monitoring is switched on or off and evaluation of the actuator code has a high or low coding level.
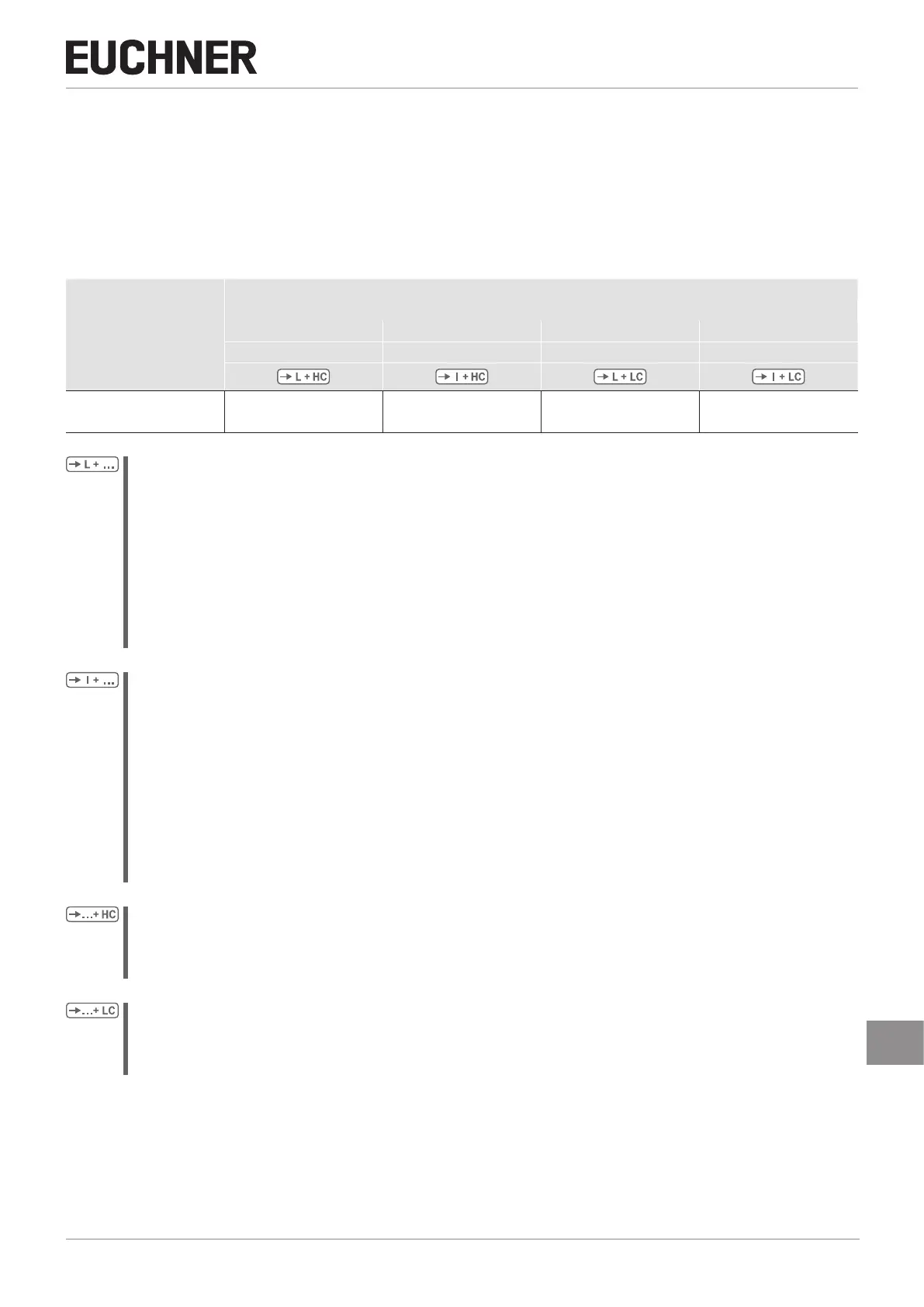
Table 1: System components
Safety switch
Function actuator
Guard lock monitoring
Active Inactive Active Inactive
High coding level High coding level Low coding level Low coding level
CTS-C1-BP/BR-FLX… A-FLX-D-0C-167919 A-FLX-D-0D-169044 A-FLX-D-0E-169045 A-FLX-D-0F-169046
The following applies to active guard lock monitoring:
In combination with a movable guard and the machine control, this safety component prevents the guard from
being opened while a dangerous machine function is being performed.
This means:
Ì Starting commands that cause a dangerous machine function must become active only when the guard is closed
and locked.
Ì The guard locking must not be released until the dangerous machine function has ended.
Ì Closing and locking a guard must not cause automatic starting of a dangerous machine function. A separate
start command must be issued. For exceptions, refer to ENISO12100 or relevant C-standards.
The following applies to inactive guard lock monitoring:
In combination with a movable guard and the machine control, this safety component prevents dangerous machine
functions from occurring while the guard is open. A stop command is triggered if the guard is opened during the
dangerous machine function. With inactive guard lock monitoring, guard locking must be used only for process
protection.
This means:
Ì Starting commands that cause a dangerous machine function must become active only when the guard is closed.
Ì Opening the guard must trigger a stop command.
Ì Closing a guard must not cause automatic starting of a dangerous machine function. A separate start command
must be issued. For exceptions, refer to ENISO12100 or relevant C-standards.
If the evaluation of the actuator code has a high coding level, the following applies:
Ì The actuator must be assigned to the safety switch by a teach-in operation so that it is detected by the system.
This unambiguous assignment ensures a particularly high level of protection against tampering. The system
thus possesses a high coding level.
If the evaluation of the actuator code has a low coding level, the following applies:
Ì For evaluation with a low coding level, a specic code is not requested but instead it is only checked whether
the actuator is of a type that can be detected by the system. There is no exact comparison of the actuator code
with the taught-in code in the safety switch. The system possesses a low coding level.
 Loading...
Loading...