Value Description
INAKTIVE Trajectory planning inactive.
AKTIVE Factory setting: trajectory planning active.
Tab. 43: Trajectory Planning
‘User parameters’ menu
The closed-loop parameters that are used in the user-defined control mode can be defined in this area.
Value Value range Description
Kp positive 0 … 9999 The ‘Kp positive’ parameter defines the proportional amplification gain
of the PID controller for the positive direction of travel.
Kp negative 0 … 9999 The ‘Kp negative’ parameter defines the proportional amplification
gain of the PID controller for the negative travel direction.
Ki positive 0 … 9999 The ‘Ki positive’ parameter defines the integral amplification gain of
the PID controller for the positive direction of travel.
Ki negative 0 … 9999 The ‘Ki negative’ parameter defines the integral amplification gain of
the PID controller for the negative direction of travel.
Kp positive 0 … 9999 The ‘Kp positive’ parameter defines the differential gain of the PID
controller for the positive direction of travel.
Kd negative 0 … 9999 The ‘Kd negative’ parameter defines the differential gain of the PID
controller for the negative travel direction.
Tab. 44: ‘User parameters’ menu
7.2.4.3
Digital I/O
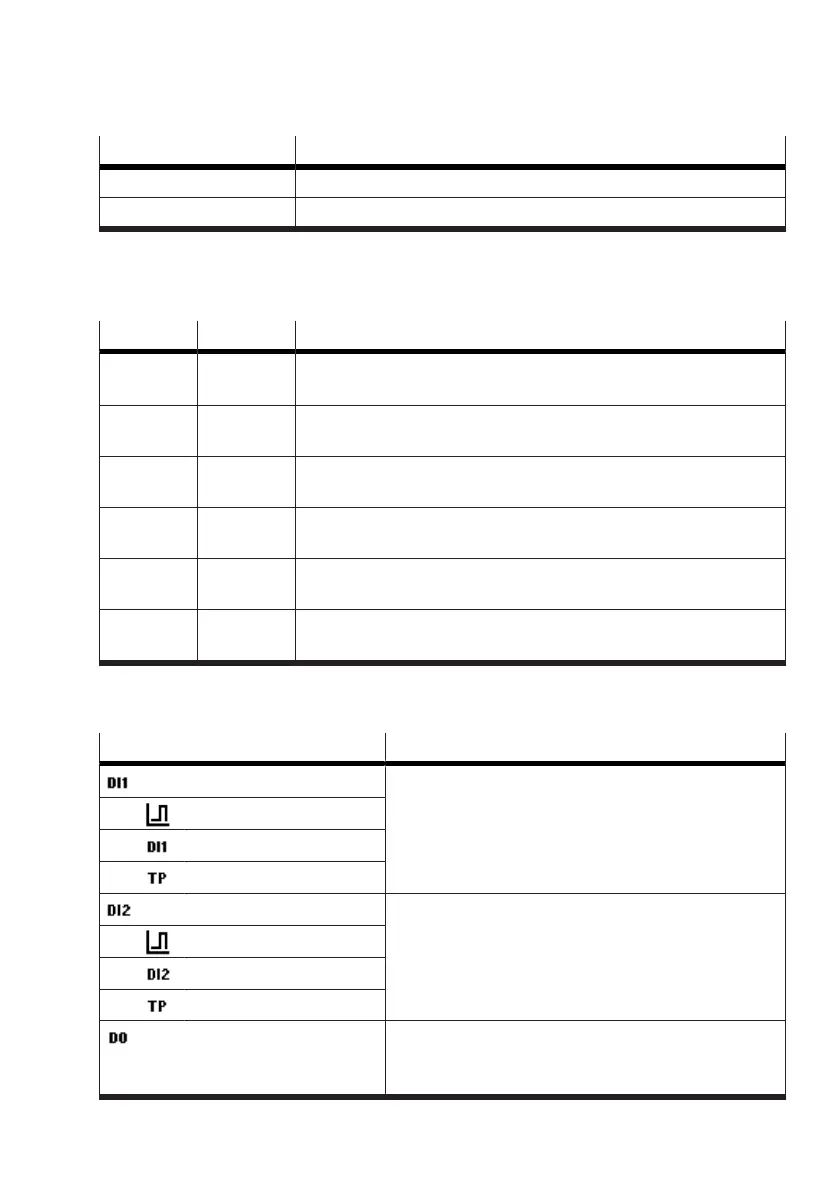
Menu option Description
Digital input 1 The parameters that define the behaviour of digital input
1 can be configured in this area.
è
‘Digital input 1’ menu
DI1 logic
DI1 function
DI1 target position
Digital Input 2
1)
The parameters that define the behaviour of digital input
2 can be configured in this area.
è
‘Digital Input 2’ menu
DI2 logic
DI2 function
DI2 target position
DO switching mode
1)
The switching characteristics of digital outputs 1 and 2
can be defined in this area.
è
DO switching mode