7-2
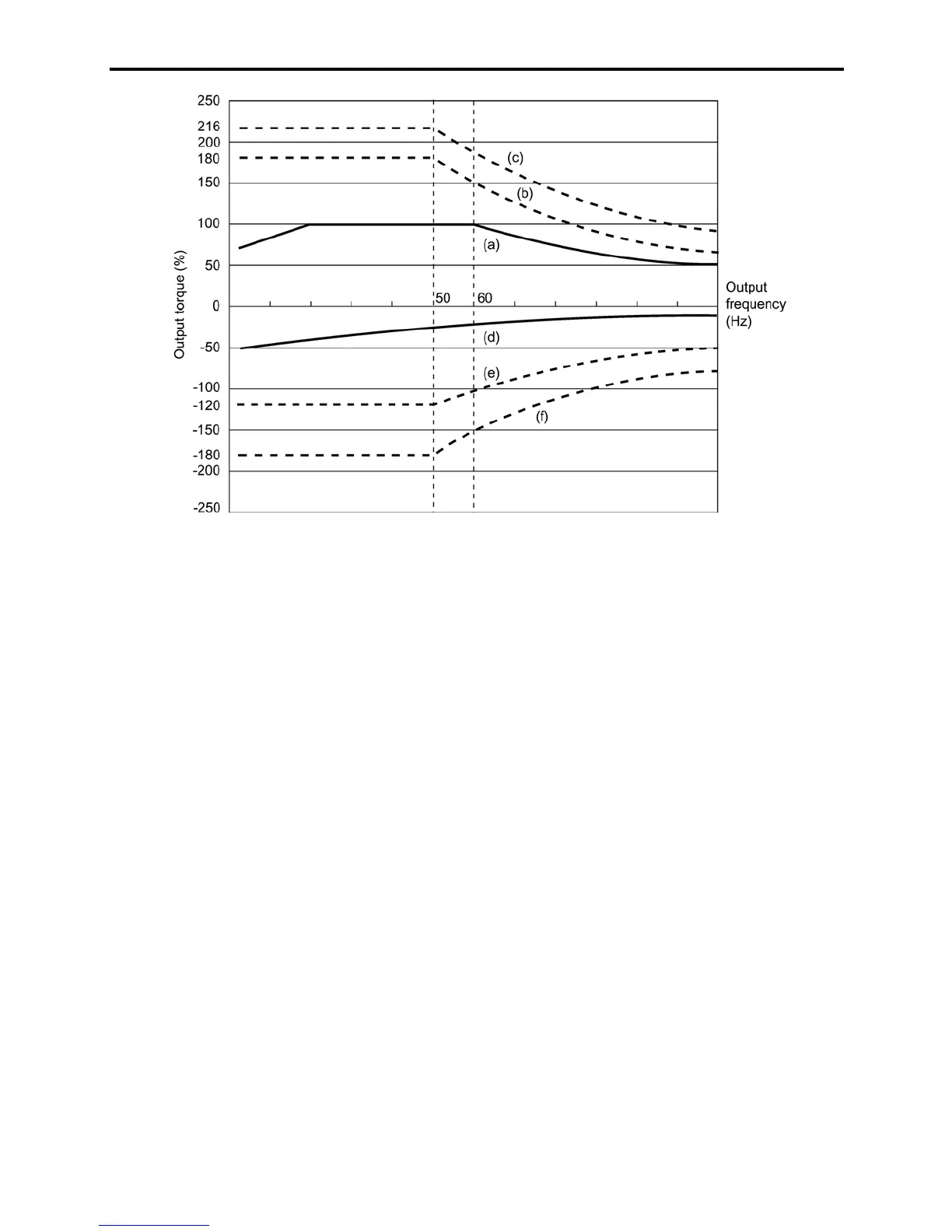
Figure 7.2 Output Torque Characteristics (Base frequency: 60 Hz)
(1) Continuous allowable driving torque (Curve (a) in Figures 7.1 and 7.2)
Curve (a) shows the torque characteristic that can be obtained in the range of the inverter continuous rated
current, where the motor cooling characteristic is taken into consideration. When the motor runs at the
base frequency of 60 Hz, 100 % output torque can be obtained; at 50 Hz, the output torque is somewhat
lower than that in commercial power, and it further lowers at lower frequencies. The reduction of the
output torque at 50 Hz is due to increased loss by inverter driving, and that at lower frequencies is mainly
due to heat generation caused by the decreased ventilation performance of the motor cooling fan.
(2) Maximum driving torque in a short time (Curves (b) and (c) in Figures 7.1 and 7.2)
Curve (b) shows the torque characteristic that can be obtained in the range of the inverter rated current in a
short time (the output torque is 150% for one minute) when torque-vector control is enabled. At that time,
the motor cooling characteristics have little effect on the output torque.
Curve (c) shows an example of the torque characteristic when one class higher capacity inverter is used to
increase the short-time maximum torque. In this case, the short-time torque is 20 to 30% greater than that
when the standard capacity inverter is used.
(3) Starting torque (around the output frequency 0 Hz in Figures 7.1 and 7.2)
The maximum torque in a short time applies to the starting torque as it is.

 Loading...
Loading...










