7.1 Selecting Motors and Inverters
7-9
Chap. 7 SELECTING OPTIMAL MOTOR AND INVERTER CAPACITIES
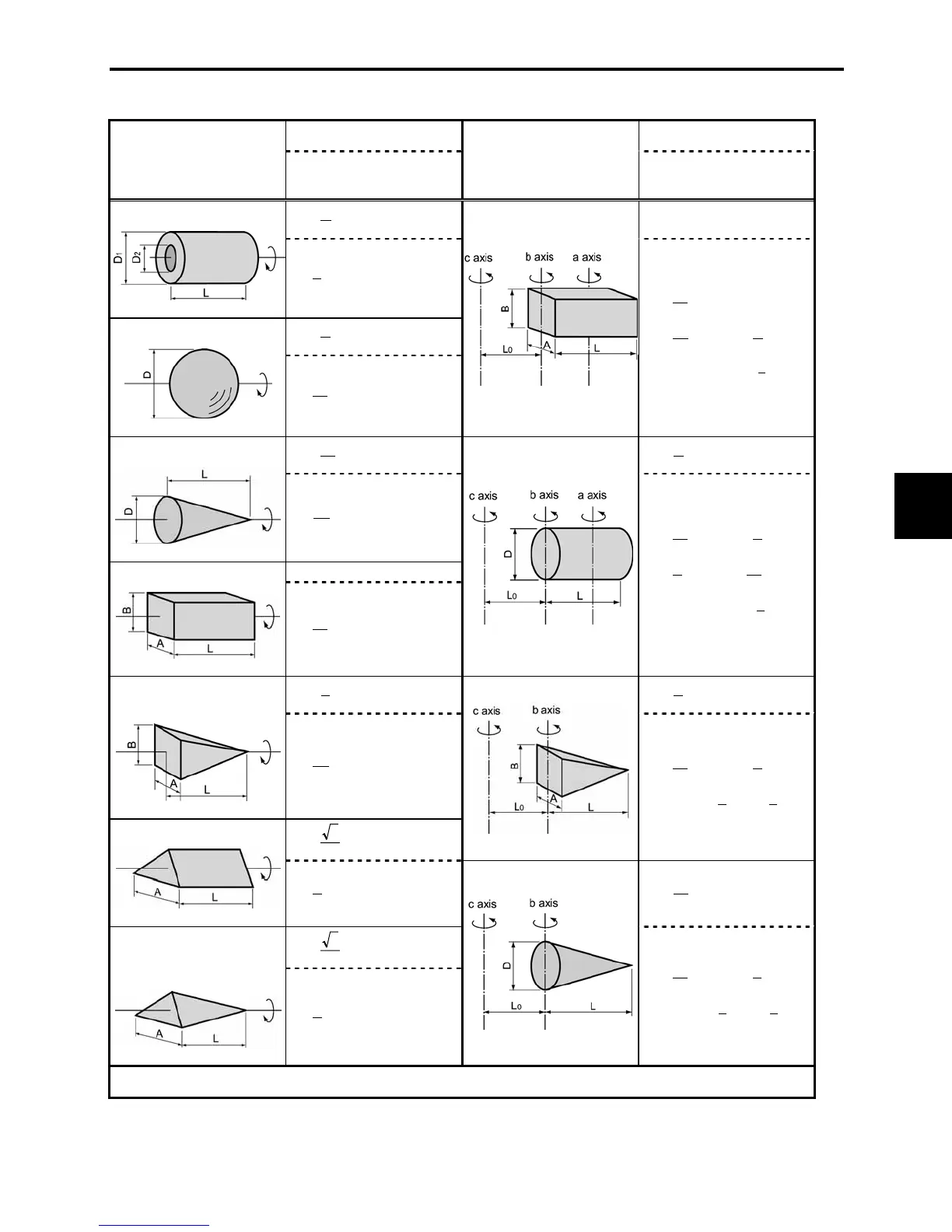
Table 7.1 Moment of Inertia of Various Rotating Bodies
Mass: W (kg) Mass: W (kg)
Shape
Moment of inertia:
J (kg·m
2
)
Shape
Moment of inertia:
J (kg·m
2
)
U
S
xxx L)DD(
4
W
2
2
2
1
U xxx LBAW
Hollow cylinder
)DD(W
8
1
J
2
2
2
1
xx
U
S
xx
3
D
6
W
Sphere
2
DW
10
1
J
xx
)AL(W
12
1
J
22
a
xx
)A
4
1
L(W
12
1
J
22
b
xxx
)L
3
1
LLL(WJ
2
0
2
0c
xxx
|
U
S
xxx
LD
12
W
2
U
S
xxx
LD
4
W
2
Cone
2
DW
40
3
J
xx
U
xxx
LBAW
Rectangular prism
)BA(W
12
1
J
22
xx
)D
4
3
L(W
12
1
J
22
a
xxx
)D
16
3
L(W
3
1
J
22
b
xxx
)L
3
1
LLL(WJ
2
0
2
0c
xxx
|
U
xxxx
LBA
3
1
W U
xxxx
LBA
3
1
W
Square cone (Pyramid,
rectangular base)
)BA(W
20
1
J
22
xx
U
xxx
LA
4
3
W
2
)A
4
1
L(W
10
1
J
22
b
xxx
)L
5
3
LL
2
3
L(WJ
2
0
2
0c
xxxx
|
Triangular prism
2
AW
3
1
J
xx U
S
xxx LD
12
W
2
U xxx LA
12
3
W
2
Tetrahedron with an
equilateral triangular
base
2
AW
5
1
J
xx
)D
8
3
L(W
10
1
J
22
b
xxx
)L
5
3
LL
2
3
L(WJ
2
0
2
0c
xxxx
|
Main metal density (at 20qC (68qF)) U(kg/m
3
) Iron: 7860, Copper: 8940, Aluminum: 2700

 Loading...
Loading...










