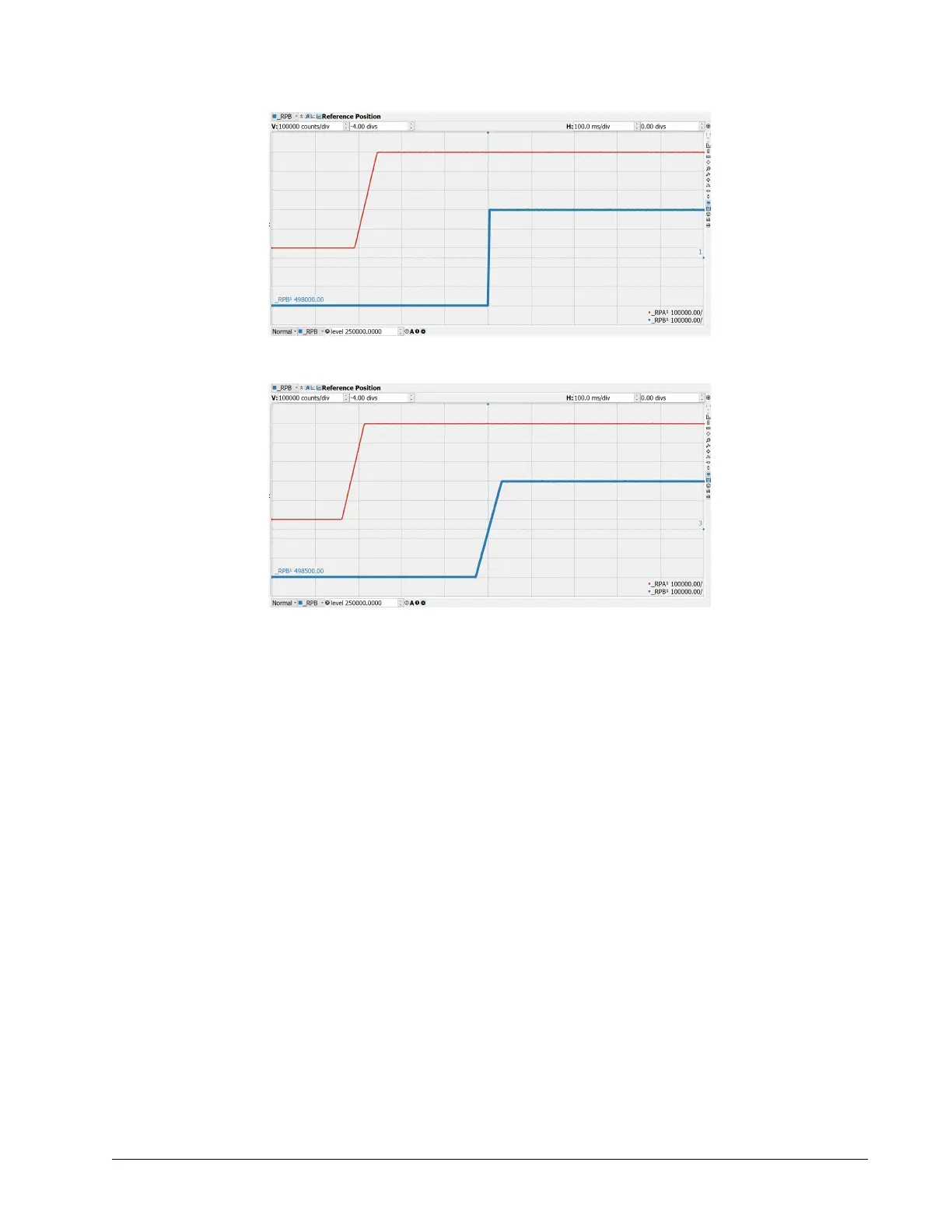
The slave axis for each figure is shown on the bottom portion of the figure; the master axis is shown on the top
portion. The shock to the slave axis will be significantly less in Figure 6.12 than in Figure 6.11. The ramped gearing
does have one consequence. There isn’t a true synchronization of the two axes, until the gearing ramp is
complete. The slave will lag behind the true ratio during the ramp period. If exact position synchronization is
required from the point gearing is initiated, then the position must be commanded in addition to the gearing. The
controller keeps track of this position phase lag with the _GP operand. The following example will demonstrate
how the command is used.
Example – Electronic Gearing Over a Specified Interval
Objective Run two geared motors at speeds of 1.132 and -.045 times the speed of an external master. Because the
master is traveling at high speeds, it is desirable for the speeds to change slowly.
Solution: Use a DMC-4133 controller where the Z-axis is the master and X and Y are the geared axes. We will
implement the gearing change over 6000 counts (3 revolutions) of the master axis.
MO Z
Turn Z off, for external master
GA Z, Z
Specify Z as the master axis for both X and Y.
GD 6000,6000
Specify ramped gearing over 6000 counts of the master axis.
GR 1.132,-.045
Specify gear ratios
Question: What is the effect of the ramped gearing?
Answer: Below, in the example titled Electronic Gearing, gearing would take effect immediately. From the start of
gearing if the master traveled 6000 counts, the slaves would travel 6792 counts and 270 counts.
Chapter 6 Programming Motion ▫ 75 DMC-41x3 User Manual
Figure 6.11: Velocity counts/sec vs. Time (msec) Instantaneous Gearing Engagement
Figure 6.12: Velocity (counts/sec) vs. Time (msec) Ramped Gearing