General Velocity Profiles
The Contour Mode is ideal for generating any arbitrary velocity profiles. The velocity profile can be specified as a
mathematical function or as a collection of points.
The design includes two parts: Generating an array with data points and running the program.
Generating an Array - An Example
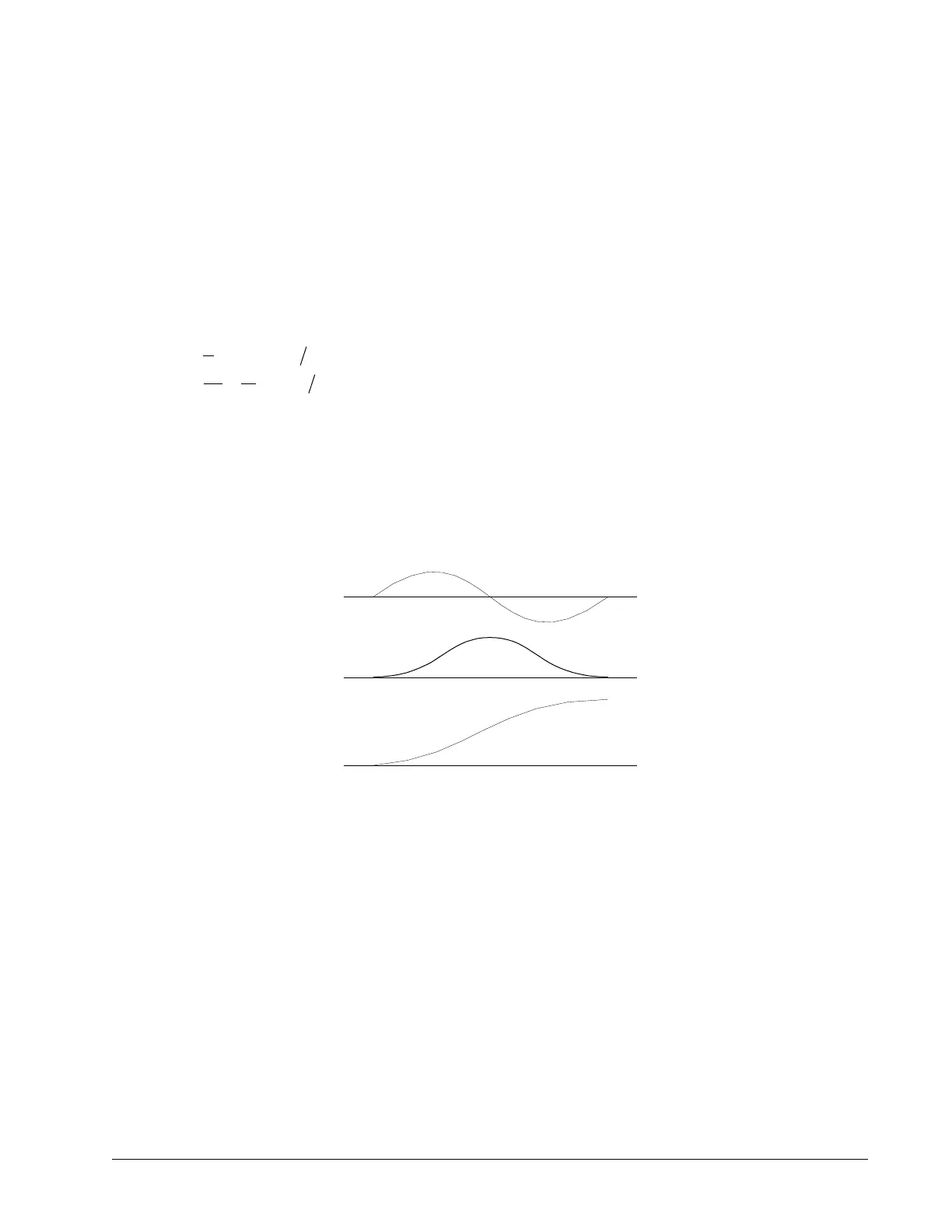
Consider the velocity and position profiles shown in Figure 6.19. The objective is to rotate a motor a distance of
6000 counts in 120 ms. The velocity profile is sinusoidal to reduce the jerk and the system vibration. If we
describe the position displacement in terms of A counts in B milliseconds, we can describe the motion in the
following manner:
Note: ω is the angular velocity; X is the position; and T is the variable, time, in milliseconds.
In the given example, A=6000 and B=120, the position and velocity profiles are:
X = 50T - (6000/2π) sin (2π T/120)
Note that the velocity, ω, in count/ms, is
ω = 50 [1 - cos 2π T/120]
Figure 6.19: Velocity Profile with Sinusoidal Acceleration
The DMC-41x3 can compute trigonometric functions. However, the argument must be expressed in degrees.
Using our example, the equation for X is written as:
X = 50T - 955 sin 3T
A complete program to generate the contour movement in this example is given below. To generate an array, we
compute the position value at intervals of 8 ms. This is stored at the array POS. Then, the difference between the
positions is computed and is stored in the array DIF. Finally the motors are run in the contour mode.
Contour Mode Example
INSTRUCTION INTERPRETATION
#POINTS
Program defines X points
DM POS[16]
Allocate memory
DM DIF[15]
C=0
Set initial conditions, C is index
T=0
T is time in ms
#A
V1=50*T
V2=3*T
Argument in degrees
Chapter 6 Programming Motion ▫ 87 DMC-41x3 User Manual