HI 6600 Series Modular Sensor System User Guide
Page | 124
Status Word bit 12 (0x1000): Failed to update module firmware
Status Word bit 13 (0x2000): Saving to nonvolatile memory
Status Word bit 14 (0x4000): IT test in progress
Status Word bit 15 (0x8000): Parameter ID not found
Status Word bits [23:16]: reserved
The Net and Gross Weight values are always provided, in the next two variables
The final value for the selected WPM is the Parameter RD Value, which is the read only value for
the user selectable parameter ID value set in the output table. If a 0x0000 is placed in the
Parameter RDx ID value, or the requested parameter does not exist a 0x0000 value will be
returned.
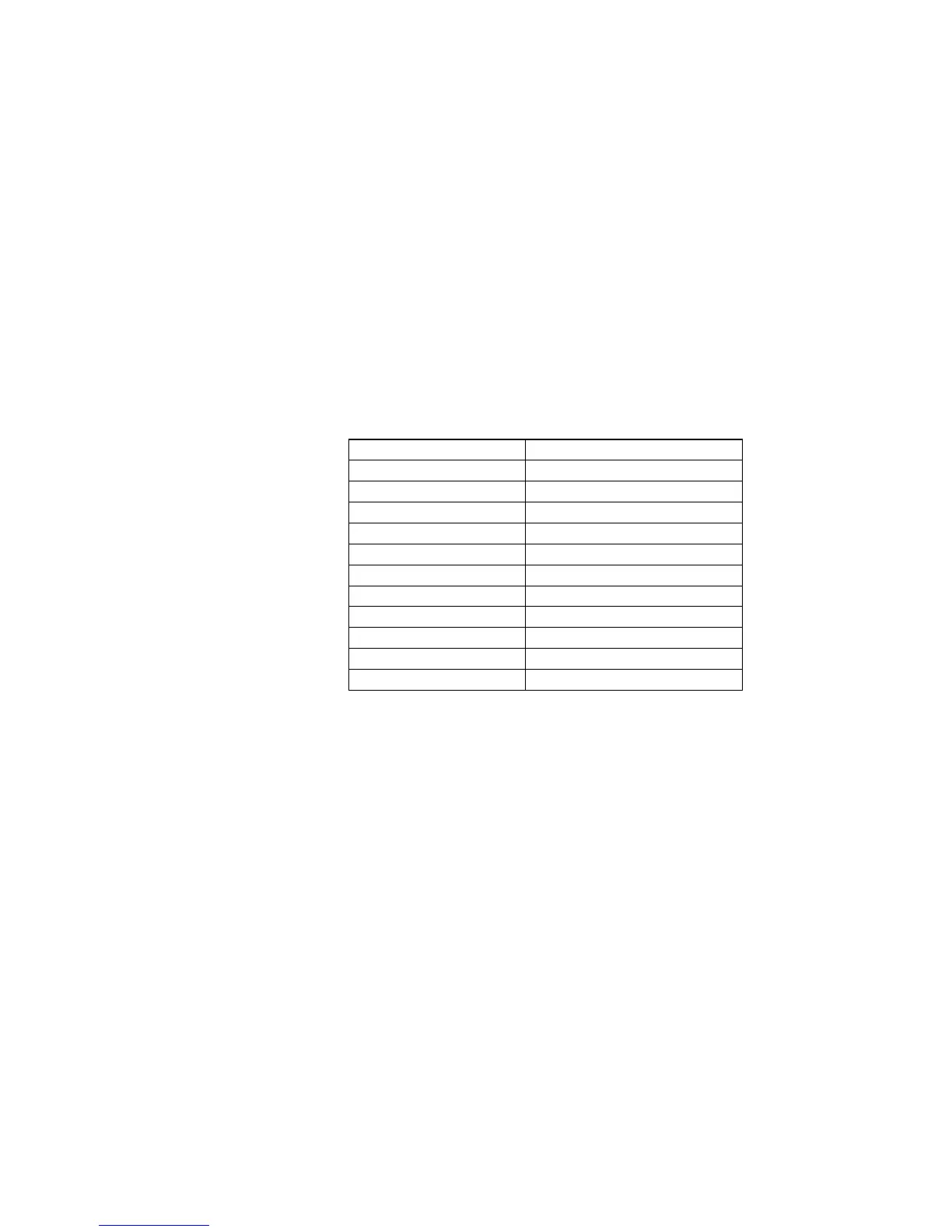
Hardy Command Numbers
Here is a list of Hardy command numbers:
Command Command
0 Read Parameter
1ZeroCmd
2TareCmd
4 Write Non-Volatile
5 Cmd (Reserved)
6 Weigh Sample Cmd
0x64
(100 Cal Low Cmd
0x65
(101 Cal High Cmd
0x66
(102 C2 Cal Cmd
0x1000 (4096 Write Integer Cmd
0x1001 (4097 Write Float Cmd
0: READ PARAM CMD. To read a parameter, write a #0 to the command register
(register #0), and
write the parameter number in the parameter ID number in registers 2
and 3, most significant word first.
The parameter value may then be read from registers
4 and 5, again most significant word first. This value
may be in integer or floating point
format, depending on the parameter. The status register in the reply
will contain the
lower 16 bits of the system status word.
o Status word bit 0: A/D error
o Status word bit 6 (0x40): Motion status.
o Status word bit 15 (0x8000): Not Found - the requested parameter number does
not exist
1: ZERO CMD. Write a #1 to the command register to ZERO the gross weight. The
status register will
read 0 if this command succeeds.
o Status Error code 1 (motion)
o Status Error code 2 (A/D error)
o Status Error code 3 (out of tolerance)
2: TARE CMD. Write a #2 to the command register to ZERO the net weight. The status
register will read
0 if this command succeeds:
o Status Error code 1 (motion)
o Status Error code 2 (A/D error)