Chapter 12. How to Use Position/Torque Servo
12-3
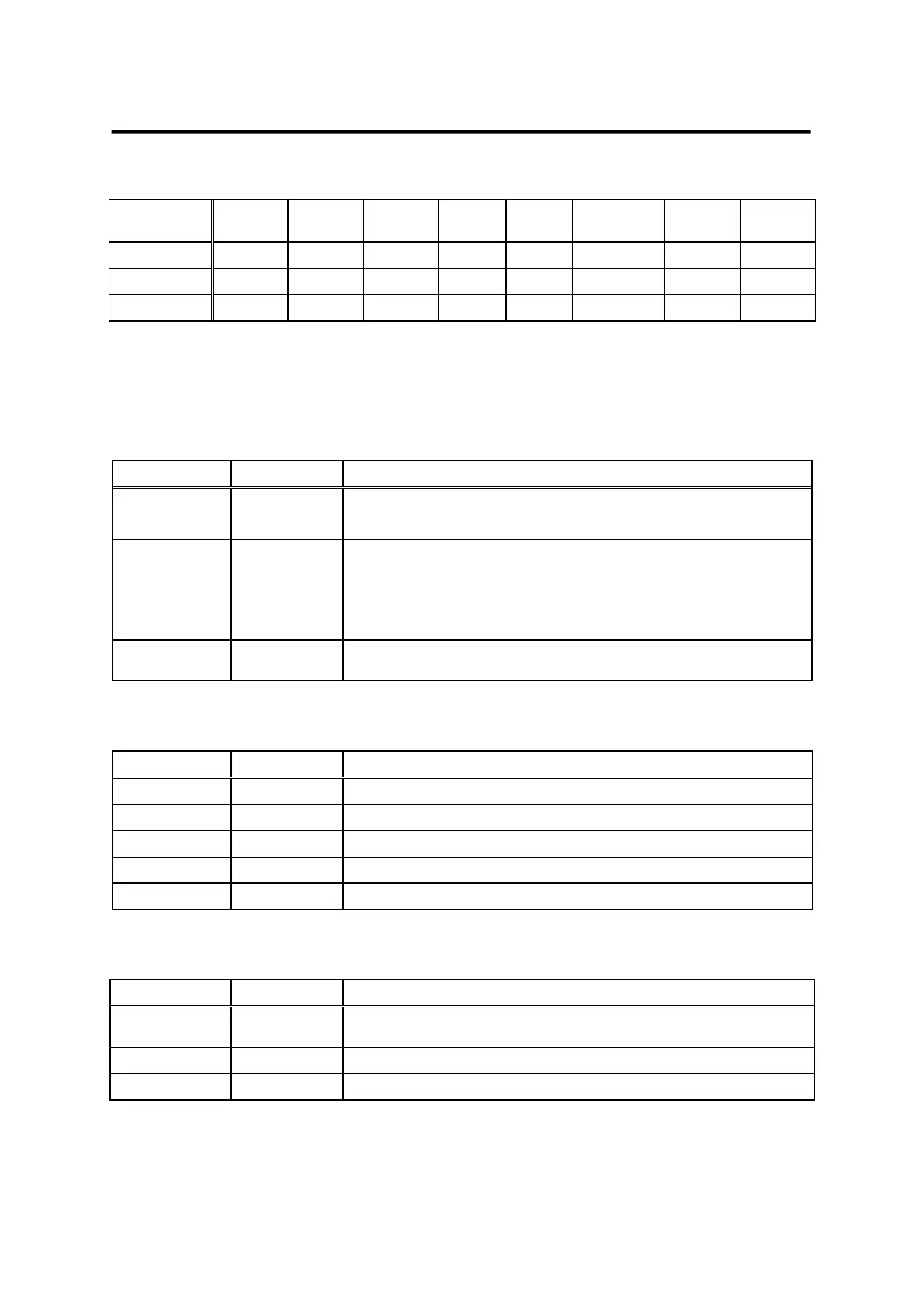
[Output status of ALARM CODES]
Alarm
type
Emerg.
Stop
Over-
current
Over-
Voltage
Over-
Load
Power
error
Encoder
miswiring
Others Normal
A_CODE0 ON OFF ON OFF ON OFF ON OFF
A_CODE1 ON ON OFF OFF ON ON OFF OFF
A_CODE2 ON ON ON ON OFF OFF OFF OFF
Where ON: Applicable contact is connected to "GND24".
OFF: Applicable contact is connected to "+24V", or applicable contact not connected.
12.2.3 Analog input use and function table
Name Pin No. Function and Use
SPDIN 27
Inputs external analog speed (-10V ~ +10V).
Valid only in torque control mode.
TRQIN 28
Position control mode: Inputs external torque limit
command (-10V ~ +10V).
Torque control mode: Inputs external torque command
(-10V ~ +10V).
PPFIN, PFIN
PPRIN, PRIN
11, 10
9, 12
Inputs position command pulse.
Valid only in position control mode.
12.2.4 Analog output use and function table
Name Pin No. Function and Use
MONIT1 3 Monitor output 1 (-4V ~ +4V)
MONIT2 2 Monitor output 2 (-4V ~ +4V)
PAO, /PAO 7, 32 A phase, /A phase encoder signal output
PBO, /PBO 6, 31 B phase, /B phase encoder signal output
PZO, /PZO 5, 30 Z phase, /Z phase encoder signal output
12.2.5 I/O contact power supply
Name Pin No. Function and Use
GND
1, 8, 26
33, 34, 36
Power ground for analog I/O, such as speed command,
torque limit command, monitor output and encoder output.
+24VIN 49 DC 24V power supply for the external I/O contact
GND24 24, 25 DC 24V ground for the external I/O contact
(Note) See section 3.4.6 for the capacity of +24V power supply.