Chapter 6. Parameter Setting
6-15
Menu Menu name Unit Display range Initial value Mode
P2-05 TRQ LMT(+) [%] % 0 ~ 300 300 SP
P2-06 TRQ LMT(-) [%] % 0 ~ 300 300 SP
[TRQ LMT(+) (P2-05)]
Maximum CW torque =
100
× rated torque
[TRQ LMT(+) (P2-06)]
Maximum CCW torque =
100
× rated torque
Menu Menu name Unit Display range Initial value Mode
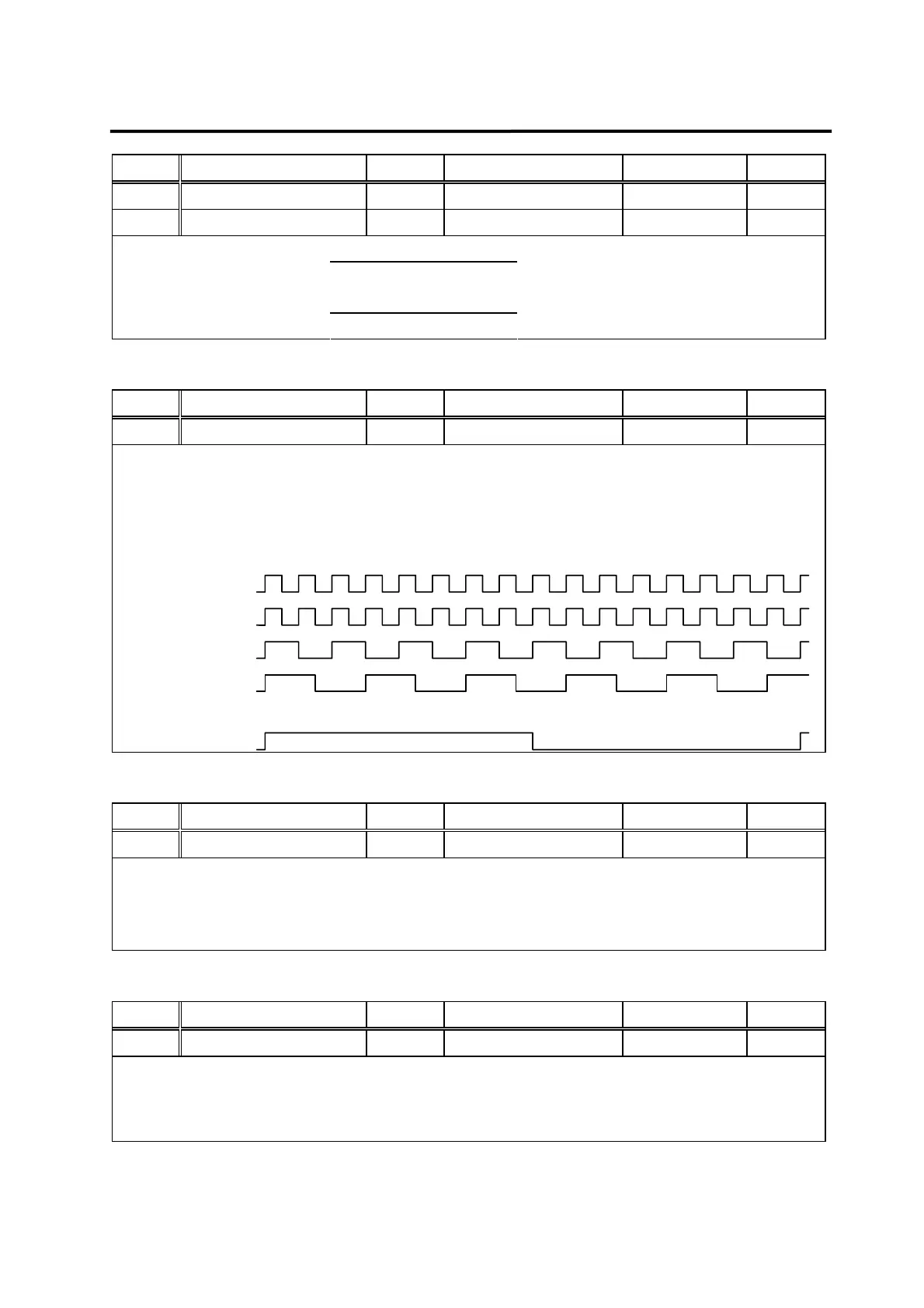
P2-07 Pulse Out Rate Division 1 ~ 16 1 SPT
Divide the A and B phase encoder pulses fed back from the motor, and set the encoder
pulse dividing ratio to be output in line drive method. The allowable dividing ratio is from 1
division to 16 division. Input desired dividing ratio in this item. Frequency division is defined
as follows.
Feedback pulse
1 freq. division
..........
2 freq. division
3 freq. division
16 freq. division
Menu Menu name Unit Display range Initial value Mode
P2-08 Currnet Offset 0, 1 0 SP
Motor speed may have periodic ripple due to the effects of the servo current offset. If this
happens, use the current offset function.
"1" = Automatically offsets current offset during Servo-On.
Menu Menu name Unit Display range Initial value Mode
P2-09 Brake SPD[RPM] RPM 0.0 ~ 9999.9 50.0 SPT
If the servo is turned OFF during servo motor operation and the brake speed is reduced, set
the speed which activates the external machine brake in RPM (r/min). The output contact
(Brake) is turned OFF at this time.