Shenzhen Hpmont Technology Co., Ltd. Chapter 7 Detailed Function Introduction
HD09-S Series User Manual V1.1 - 47 -
Ref. Code Function Description Setting Range [Default]
F09.14 AVR function (automatic voltage rugulator) 0 - 2 [1]
This parameter is valid only in V/f control mode. AVR is always on during open-loop vector control.
0: No action.
1: Constant action.
2: Only Dec. and no action.
• When the input voltage deviates from the rated value, the AVR function keeps the output voltage constant,
so the AVR should operate normally under normal conditions, especially when the input voltage is higher
than the rated value.
• When slowing down, the energy feedbacks to inverter from load, busbar voltage rise, F09.14 = 0 or 2,
running current is larger; F09.14 = 1, motor slowdown and steady, running current is smaller.
F09.15 Motor low frequency suppression shock coefficient 0 - 200 [50]
Motor high frequency suppression shock coefficient
It is used to restrain the natural oscillation generated when the inverter is matched with the motor. When the
parameters are set unreasonably, it may cause current oscillation.
• If the output current repeatedly changes during constant load operation, F09.16 can be set at the factory
parameters to eliminate the oscillation and make the motor run smoothly.
7.11 F10: Motor Vector Control Speed-loop Parameters
Ref. Code Function Description Setting Range [Default]
Speed control proportional gain 1 of motor
F10.01 Speed control integral time 1 of motor 0.00 - 10.00 [0.20s]
Speed control proportional gain 2 of motor
F10.03 Speed control integral time 2 of motor 0.00 - 10.00 [0.20s]
Speed-loop PI switching frequency 1 of motor
F10.05 Speed-loop PI switching frequency 2 of motor 0.00 - 50.00 [15.00Hz]
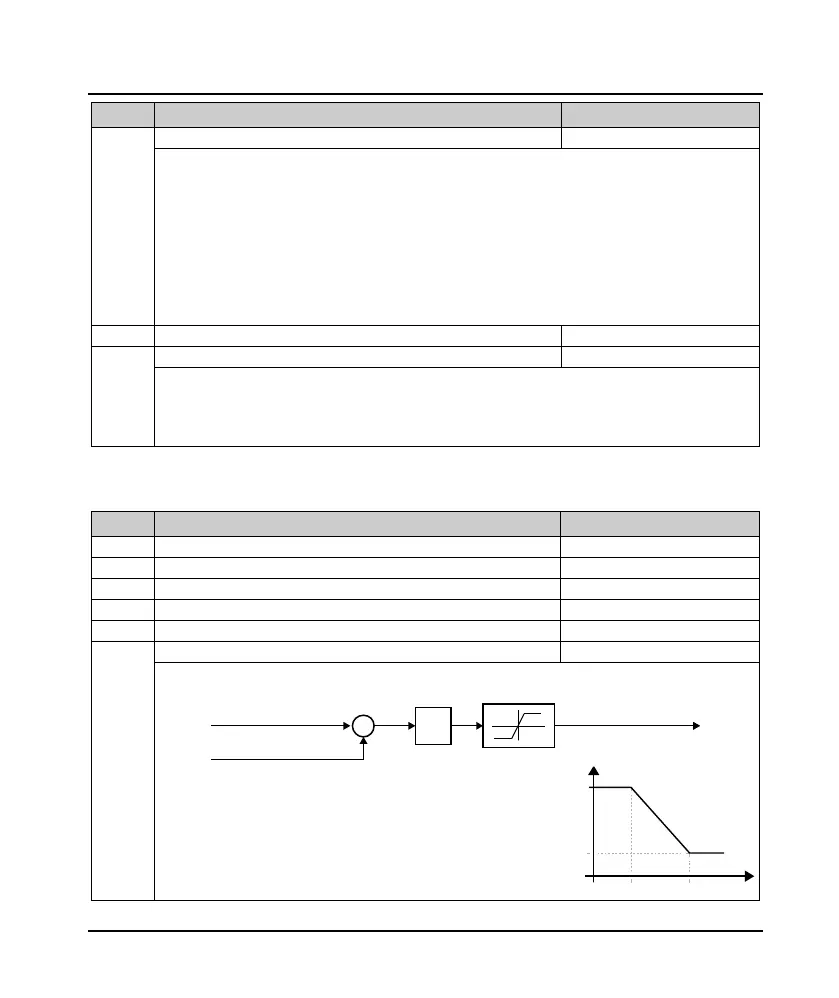
F10.00 - F10.05, F10.07 set PID parameters of speed regulator (ASR). Block diagram of the speed regulator as
shown below:
As shown on the right:
• When running in the 0 - F10.04 interval, the vector control PI is
F10.00, F10.01;
• When running at the frequency above F10.05, the vector control
PI is F10.02, F10.03;
Frequency feedback
Frequency command
Error
PID
Torque limit
Torque current setting
+
-
F10.04 F10.05
F10.00 /
F10.01
F10.02 /
F10.03
0
Frequency
PI parameter

 Loading...
Loading...
