Shenzhen Hpmont Technology Co., Ltd. Chapter 7 Detailed Function Introduction
HD09-S Series User Manual V1.1 - 49 -
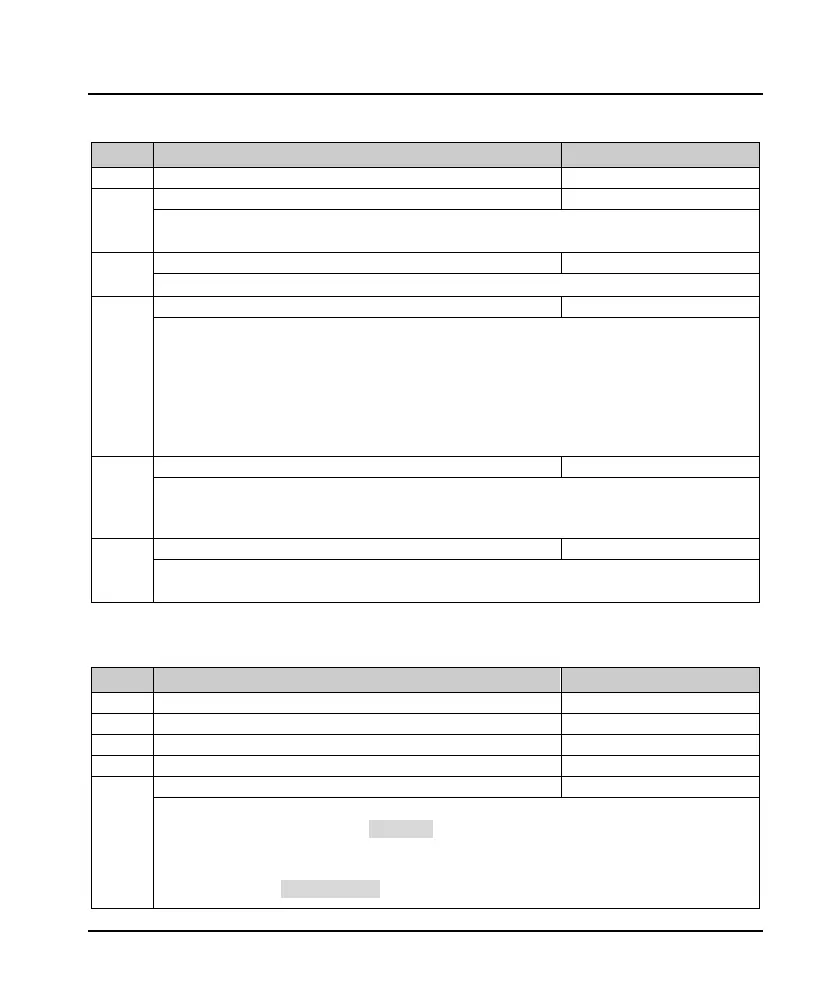
7.12 F11: Motor Vector Control Current Loop Parameter
Ref. Code Function Description Setting Range [Default]
F11.00 Motor current loop KP 1 - 2000 [800]
Defines the PI parameters for a setting current loop regulator (ACR).
• Normally, it is recommended not to adjust the current loop parameters.
Motor current loop output filter times
The output of the current loop regulator is filtered.
Motor current loop feedforward enabled
The output voltage feedforward of current loop feedforward is calculated in real time based on the motor
parameters and the detected field current and torque current.
• When the motor parameters are accurate, the current loop feedFWD can boost the dynamic response of
the entire system.
• When the motor parameters are not accurate, please disable the current loop feedforward.
0: Feedforward is prohibited.
1: Enable feedforward.
Motor excitation boost setting
Setting range 0.0 - 30.0% motor no-load excitation current.
Motor load frequency within the rated frequency range, improve the motor carrying capacity by increasing
the motor excitation current.
Motor field orientation optimization setting
0: Field orientation correction is forbidden.
1: Enables magnetic field orientation correction.
7.13 F15: Digital Input / Output Terminals Parameter
Ref. Code Function Description Setting Range [Default]
F15.01 DI2 function 0 - 86 [3]
F15.03 DI4 function 0 - 86 [0]
0: Reserved. Set terminal in a non-functional state, even if there is signal.
• Unused DI terminals can be set to 0 (reserved), in case of error or false action.
1: Inverter enable.
• Enable, the inverter can work. Invalid, prohibit operation in stop condition and stop freely.
• DI terminal set to 1 (inverter enable), the default frequency converter is effective.

 Loading...
Loading...
