40
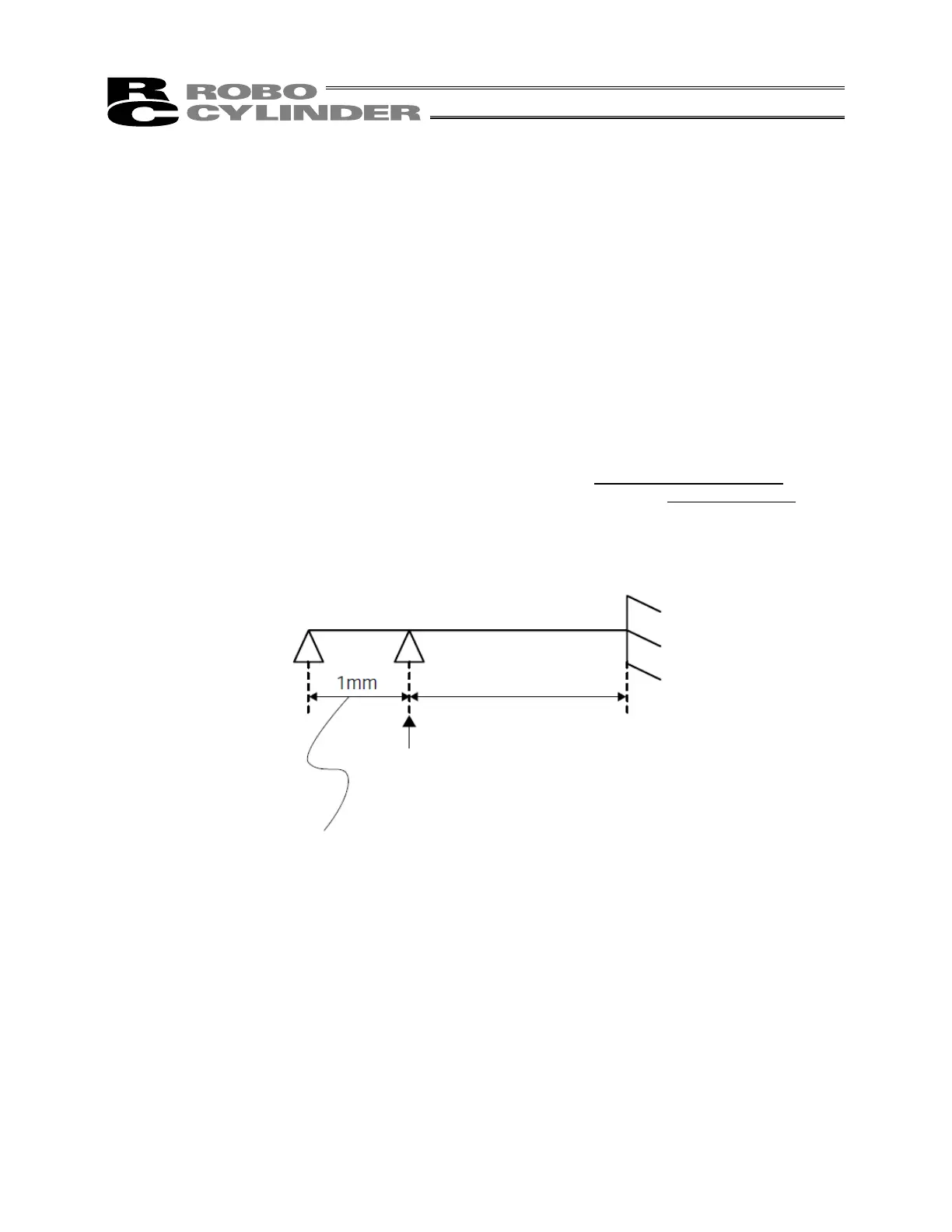
Home position
Z phase ON
osition
Mechanical end
Approx. 2 mm
The countermark on the motor aligns
with this position.
Use Parameter home return offset distance (SCON) or home preset
value (SSEL and X-SEL) to specify the settings
(The values displayed above are factory default settings).
15.8.6 Replacing the Belt of the Motor Reversing Type (SA4R, SA5R, SA6R)
[Items Required for Replacement]
Replacement belt Allen wrenches Phillips screwdriver
Tension gauge (capable of tensioning to 7 kgf or greater)
Strong string, looped (or long tie-band)
Scale Oil-based marker pen
PC or teaching pendant
[Overview of Replacement]
1) Move the slider to a position where Z phase turns on (home position) (2 mm from the mechanical end).
In this position, loosen the motor-unit affixing bolts and replace the belt.
2) Restore the home position.
Affix the slider at a position 2 mm from the mechanical end on the home side, pass the belt, and adjust
the belt to the specified tension.
3) Perform homing using a PC or teaching pendant and check for deviation from the initial home position.
If there is a deviation when the SCON controller is being used, use home return offset distance
to
make the adjustments. If the SSEL or the X-SEL controller is being used, use home preset value
to
make the adjustments.

 Loading...
Loading...





