page 32
If a participant immediately detects an error it made (it is
responsible for the error), this participant is more severely
"punished" for the error than the other bus participants. To do
so, the counter is incremented by a higher amount. If the count
exceeds a certain value, it can be assumed that this participant
is faulty. To prevent this participant from further disturbing the
bus communication by means of
active error messages
(error-
active), it will become
error-passive
.
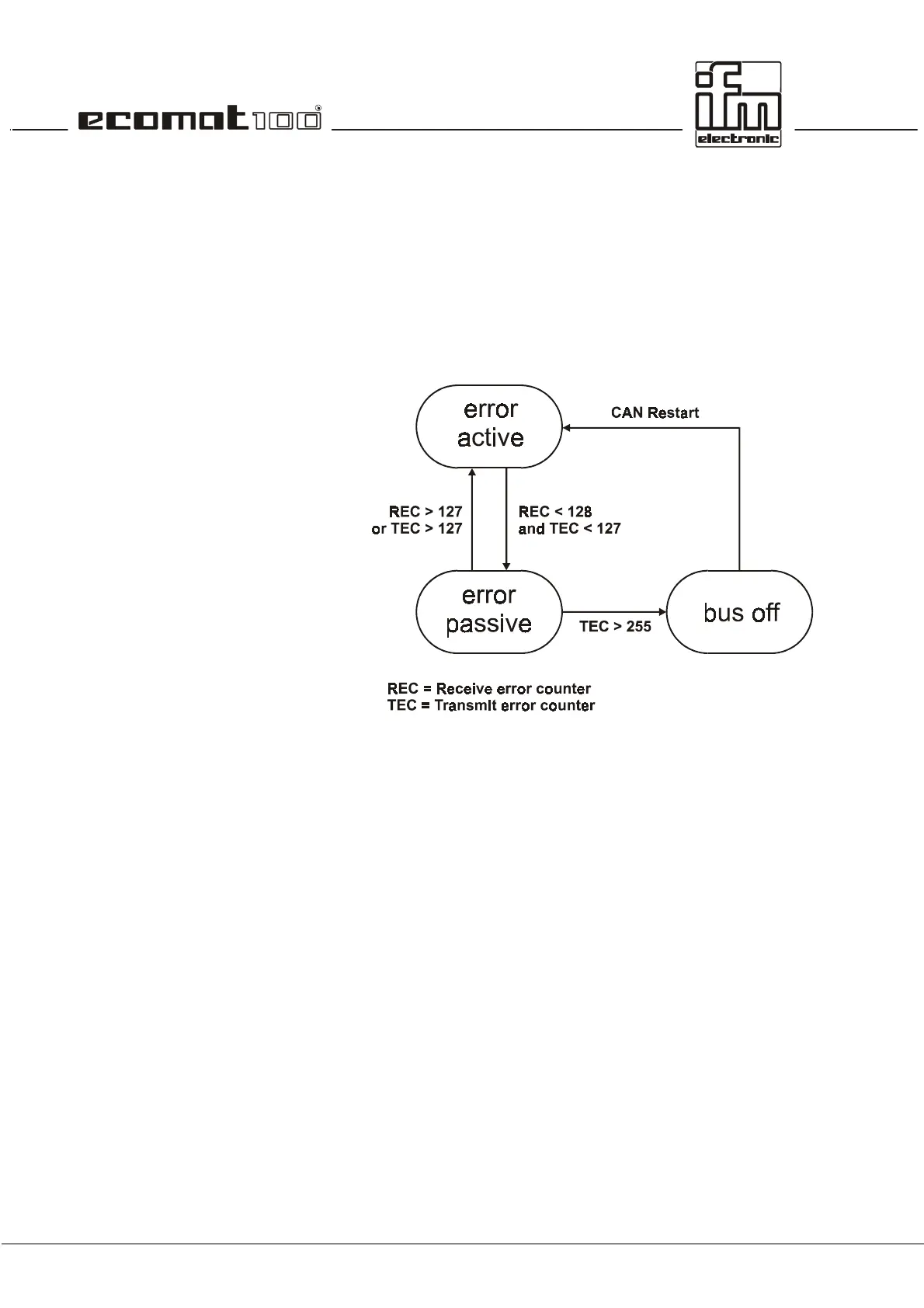
Participant, error-active
An error-active participant takes part in the bus communication
without restriction and is allowed to signal detected errors by
sending the active error flag. As already described, this corrupts
the transferred message.
Participant, error-passive
An error-passive participant is still capable of communicating
without restriction. But it is only allowed to signal an error it
detected by means of a passive error flag which does not
interfer with the bus operation. An error-passive participant
becomes again error-active if its count is again below a defined
value.
Participant, bus-off
If the error count continues to increment, the participant is
switched off from the bus (bus-off) after a maximum count of
the participant has been exceeded.
The bus-off state can only be removed by a reset
(CAN_RESTART) of the CAN controller.
 Loading...
Loading...