3D sensor
38
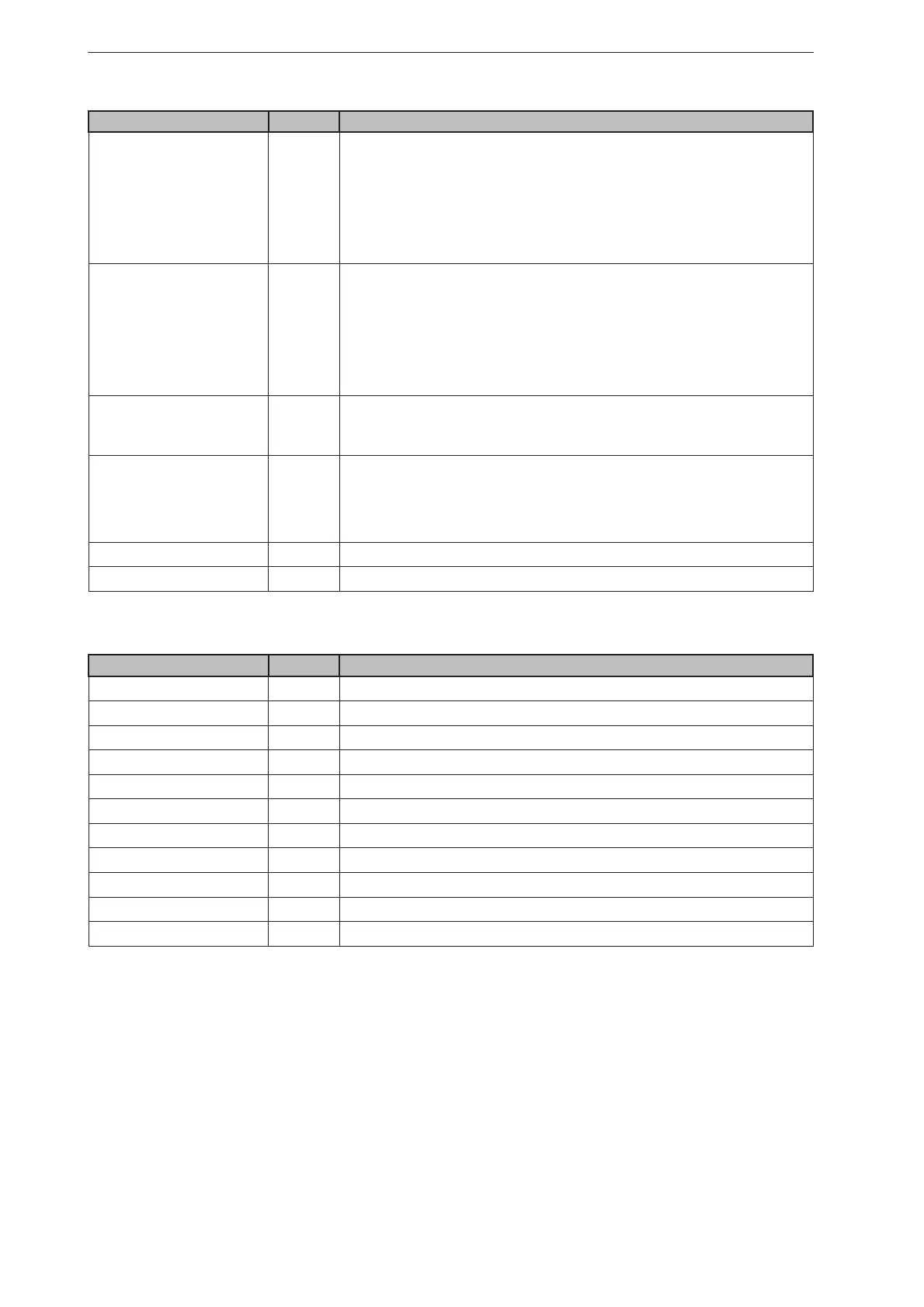
Constant Value Description
CARTESIAN_Y_
COMPONENT
201 The Y matrix denotes the Y component of the Cartesian coordinate
of a PMD 3D measurement. The origin of the device coordinate
system is in the middle of the lens' front glass, if the extrinsic
parameters are all set to 0.
Data type: 16-bit signed integer
Unit: millimetres
CARTESIAN_Z_
COMPONENT
202 The Z matrix denotes the Z component of the Cartesian coordinate
of a PMD 3D measurement. The origin of the device coordinate
system is in the middle of the lens' front glass, if the extrinsic
parameters are all set to 0.
Data type: 16-bit signed integer
Unit: millimetres
CARTESIAN_ALL 203 CARTESIAN_X_COMPONENT,
CARTESIAN_Y_COMPONENT,
CARTESIAN_Z_COMPONENT
UNIT_VECTOR_ALL 223 The unit vector matrix contains 3 values [ex, ey, ez] for each PMD
pixel, i.e. the data layout is [ex_1,ey_1,ez_1, ... ex_N, ey_N,
ez_N], where N is the number of PMD pixels.
Data type: 32-bit floating point number (3x per pixel)
CONFIDENCE_IMAGE 300 See Additional Information for Image Data (→ 13.1.4)
DIAGNOSTIC 302 See Receiving Images (→ 13.1.2)
Pixel format:
Constant Value Description
FORMAT_8U 0 8-bit unsigned integer
FORMAT_8S 1 8-bit signed integer
FORMAT_16U 2 16-bit unsigned integer
FORMAT_16S 3 16-bit signed integer
FORMAT_32U 4 32-bit unsigned integer
FORMAT_32S 5 32-bit signed integer
FORMAT_32F 6 32-bit floating point number
FORMAT_64U 7 64-bit unsigned integer
FORMAT_64F 8 64-bit floating point number
Reserved 9 N/A
FORMAT_32F_3 10 Vector with 3x32-bit floating point number