Goodrive35 Series Closed-loop Vector Control VFD Basic operation instruction
137
Note: If fault occurs, please do as the "Fault Tracking". Estimate the fault reason and settle the issue.
Besides P00.01 and P00.02, terminal command setting can also be used to set running command
channel.
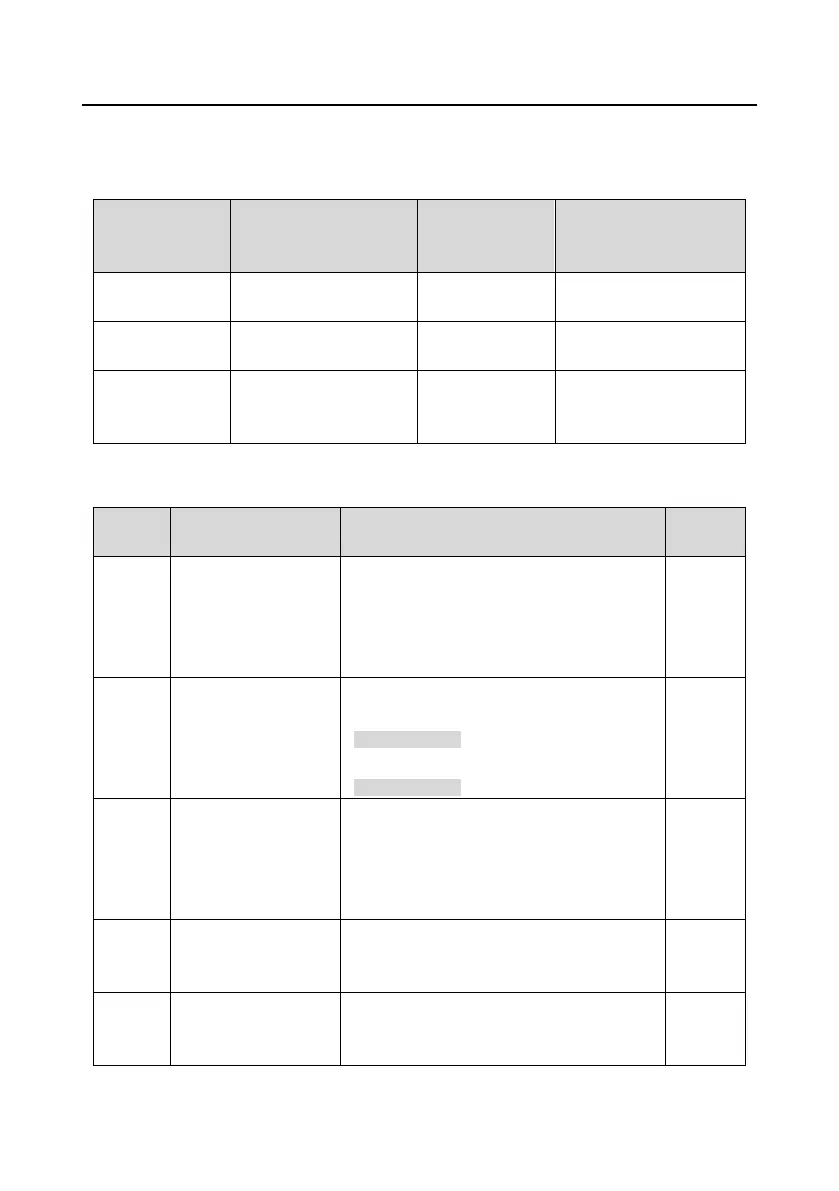
Current running
command channel
P00.01
Multi-function terminal
36
Switch to keypad
Multi-function
terminal 37
Switch to terminal
Multi-function terminal 38
Switch to communication
Keypad running
command channel
Terminal running
command channel
Communication running
command channel
Terminal running
command channel
Keypad running command
channel
Communication running
command channel
Communication
running command
channel
Keypad running command
channel
Terminal running
command channel
Note: "/" means the multi-function terminal is invalid on the current given channel.
Relative parameters table:
Detailed instruction of parameters
0: Sensorless vector control mode 0 (apply to
AM and SM)
1: Sensorless vector control mode 1 (applying to
AM)
2: SVPWM control
0: Keypad running command
1: Terminal running command channel
("LOCAL/REMOT" flickering)
2: Communication running command channel
("LOCAL/REMOT" on);
Communication running
commands
0: Modbus communication channel
1: PROFIBUS\CANopen communication
channel
2: Ethernet communication channel
3: Reserved
Function
restore parameter
0: No operation
1: Restore the default value
2: Cancel the fault record
Motor parameter
autotuning
0: No operation
1: Rotation autotuning
2: Static autotuning 1 (autotune totally)

 Loading...
Loading...