SV-DA200 series AC servo drives Faults and solutions
‐110‐
This parameter is used to set 1
st
speed detection filter.
Note: 5000 means there is no filter. Setting this parameter to a small value may reduce motor
noise and speed fluctuation, but it also lower down the responsiveness.
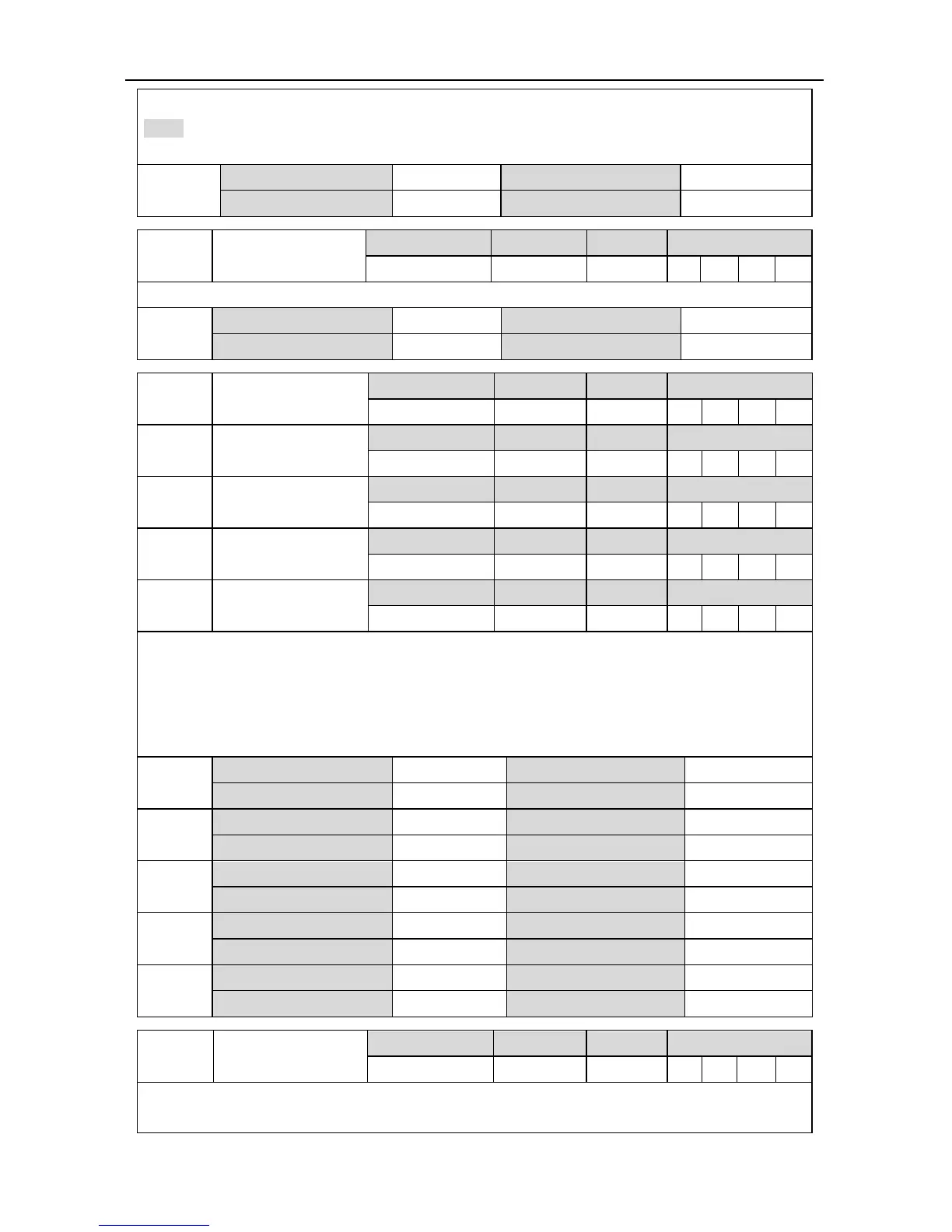
P2.03
Data size 16bit Data format DEC
Modbus address 1406,1407 CANopen address 0x2203, 0x00
P2.04 1
st
torque filter
Setting range Default Unit Available mode
0.00~25.00 0.84 ms P S T F
This parameter is used to set the time constant of torque filter.
P2.04
Data size 16bit Data format DEC
Modbus address 1408,1409 CANopen address 0x2204,0x00
P2.05 2
nd
speed gain
Setting range Default Unit Available mode
0.0~3276.7 27.0 Hz P S T F
P2.06
2
nd
speed integral
time constant
Setting range Default Unit Available mode
0.1~1000.0 1000.0 ms P S T F
P2.07 2
nd
position gain
Setting range Default Unit Available mode
0.0~3276.7 57.0 1/s P F
P2.08
2
nd
speed detection
filter
Setting range Default Unit Available mode
100~5000 5000 Hz P S T F
P2.09 2
nd
torque filter
Setting range Default Unit Available mode
0.00~25.00 0.84 ms P S T F
There are two groups of parameters respectively for position gain, speed gain and speed integral
time constant, speed detection filter and torque filter.
The definition of the function and content are the same with those of 1
st
group.
The user can select or switch between 1
st
gain and 2
nd
gain as needed. Please refer to the
detailed information of P2.20 and P2.34.
P2.05
Data size 16bit Data format DEC
Modbus address 1410,1411 CANopen address 0x2205,0x00
P2.06
Data size 16bit Data format DEC
Modbus address 1412,1413 CANopen address 0x2206,0x00
P2.07
Data size 16bit Data format DEC
Modbus address 1414,1415 CANopen address 0x2207,0x00
P2.08
Data size 16bit Data format DEC
Modbus address 1416,1417 CANopen address 0x2208,0x00
P2.09
Data size 16bit Data format DEC
Modbus address 1418,1419 CANopen address 0x2209,0x00
P2.10
Speed feed-forward
gain
Setting range Default Unit Available mode
0.0~100.0 0.0 % P F
This parameter is used to set the speed feed-forward gain. When the parameter is 100%, the retention
pulse running at a certain speed will be almost zero; sudden ACC/DEC will enlarge overshooting.
 Loading...
Loading...
