SV-DA200 series AC servo drives Faults and solutions
‐118‐
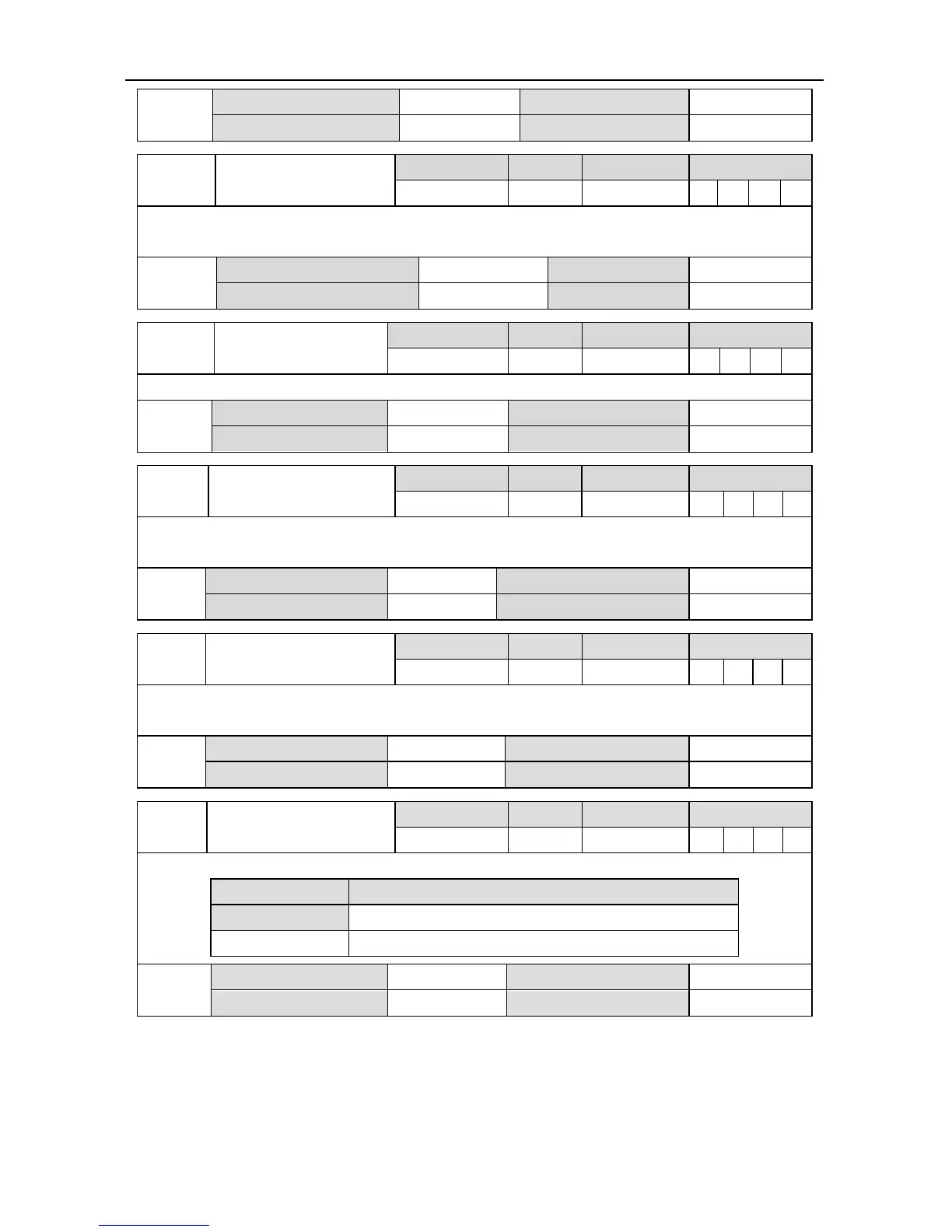
P2.60
2
Data size 16bit Data format DEC
Modbus address 1520, 1521 CANopen address 0x223C, 0x00
P2.61 Speed observer gain
Setting range Default Unit Available mode
1~1000 100 Hz P S T F
This parameter is used to set the gain of the speed observer. Increasing the setting value may
increase the response speed of the actual speed, but the vibration and noise may be raised too.
P2.61
Data size 16bit Data format DEC
Modbus address 1522,1523 CANopen address 0x223D,0x00
P2.70
Friction compensation
max-speed
Setting range Default Unit Available mode
0~1000 20 r/min P S F
This parameter is used to set the max-speed of friction compensation.
P2.70
Data size 16bit Data format DEC
Modbus address 1540,1541 CANopen address 0x2246,0x00
P2.71
Positive torque coefficient
of friction compensation
Setting range Default Unit Available mode
0.0~100.0 0.0 %/(10 r/min) P S F
Set the friction compensation value added to torque command when receiving the forward
position command or speed command.
P2.71
Data size 16bit Data format DEC
Modbus address 1542,1543 CANopen address 0x2247,0x00
P2.72
Negative torque coefficient
of friction compensation
Setting range Default Unit Available mode
-100.0~0.0 0.0 %/(10 r/min) P S F
Set friction compensation value added to the torque command when receiving negative position
command or speed command.
P2.72
Data size 16bit Data format DEC
Modbus address 1544, 1545 CANopen address 0x2248, 0x00
P2.73
Friction compensation
valid
Setting range Default Unit Available mode
0~1 0 - P S F
Set whether friction compensation is valid by this parameter
Setting value Role
[0] Invalid
1 Friction compensation
P2.73
Data size 16bit Data format DEC
Modbus address 1546, 1547 CANopen address 0x2249, 0x00
 Loading...
Loading...
