SV-DA200 series AC servo drives Communication
‐224‐
OP state.
8.3.4 CANopen functions
SV-DA200 servo drive is the standard slave station of CANopen and support some parameters of 301
standard protocol and 402 dynamic control protocol.
The basic protocol supporting CANopen: NMT, SYNC, SDO, PDO, EMCY.
The pre-definition collection includes 4 receiving PDO (Receive-PDO), 4 sending
PDO(Transmit-PDO), 1 SDO(occupying 2 CAN-ID), 1 emergency target and 1 node error control
(Node-Error-Control)ID, and it also supports NMT-Module-Control service and SYNC signal.
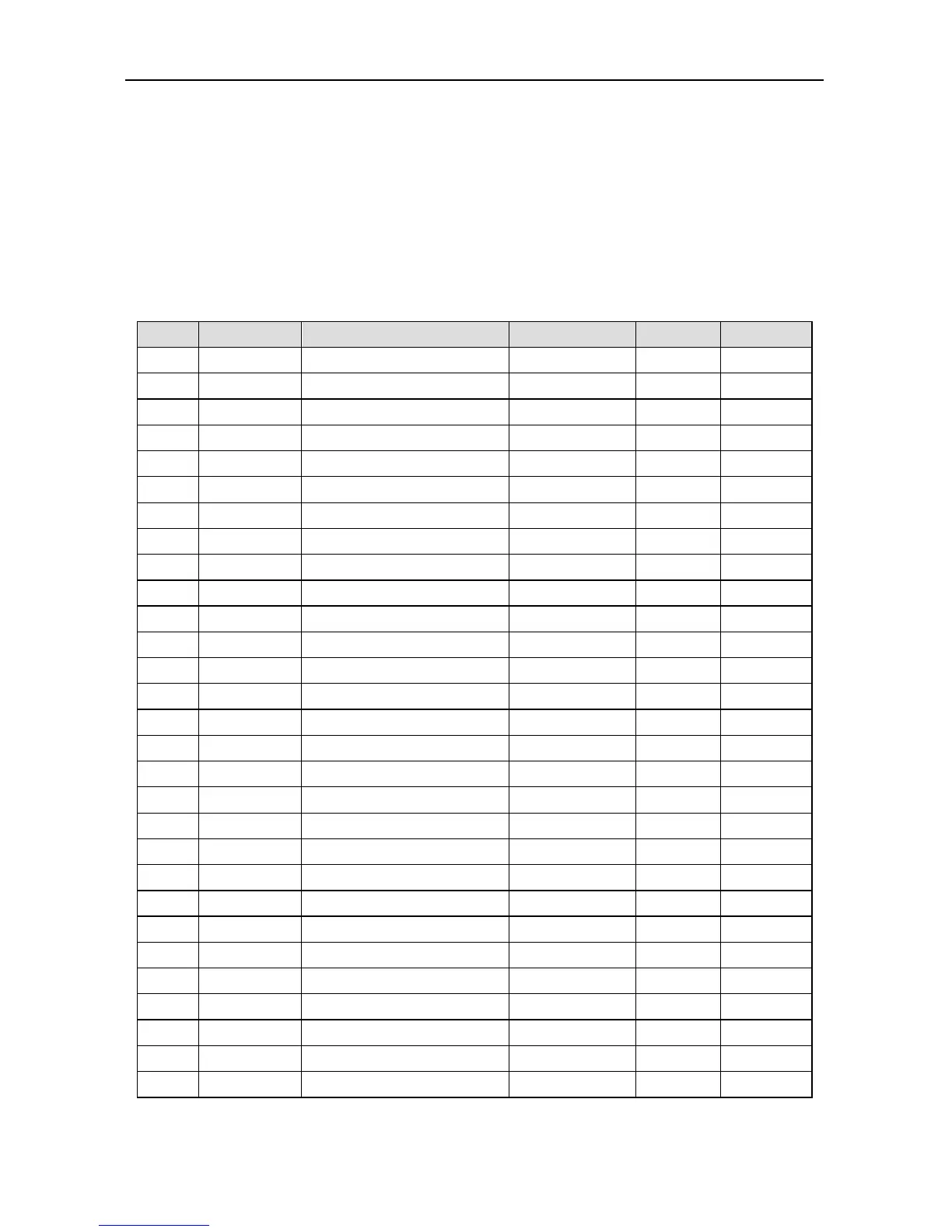
Table 8-7 Specifications of CiA 402 protocol
Index Object Type Name Data Type Access Mappable
6040
h
VAR Control word UNSIGNED16 RW Y
6041
h
VAR Status word UNSIGNED16 RO Y
6042
h
VAR vl target velocity INTEGER16 RW Y
6043
h
VAR vl velocity demand INTEGER16 RO Y
6044
h
VAR vl control effort INTEGER16 RO Y
6046
h
ARRAY vl velocity min max amount UNSIGNED32 RW Y
6047
h
ARRAY vl velocity min max UNSIGNED32 RW Y
6048
h
RECORD vl velocity acceleration UNSIGNED32 RW Y
6049
h
RECORD vl velocity deceleration UNSIGNED32 RW Y
6060
h
VAR Mode of operation INTEGER8 RW Y
6061
h
VAR Mode of operation display INTEGER8 RO Y
6062
h
VAR Position demand value INTEGER32 RO Y
6063
h
VAR Position actual value* INTEGER32 RO Y
6064
h
VAR Position actual value INTEGER32 RO Y
6065
h
VAR Following error window UNSIGNED32 RW Y
6066
h
VAR Following error time out UNSIGNED16 RW Y
6067
h
VAR Position window UNSIGNED32 RW Y
6069
h
VAR Velocity sensor actual value INTEGER32 RO Y
606B
h
VAR Velocity demand value INTEGER32 RO Y
606C
h
VAR Velocity actual value INTEGER32 RO Y
606D
h
VAR Velocity window UNSIGNED16 RW Y
606F
h
VAR Velocity threshold UNSIGNED16 RW Y
6071
h
VAR Target torque INTEGER16 RW Y
6072
h
VAR Max torque UNSIGNED16 RW Y
6073
h
VAR Max current UNSIGNED16 RO Y
6074
h
VAR Torque demand value INTEGER16 RO Y
6075
h
VAR Motor rated current UNSIGNED32 RO Y
6076
h
VAR Motor rated torque UNSIGNED32 RO Y
6077
h
VAR Torque actual value INTEGER16 RO Y

 Loading...
Loading...