SV-DA200 series AC servo drives Communication
‐225‐
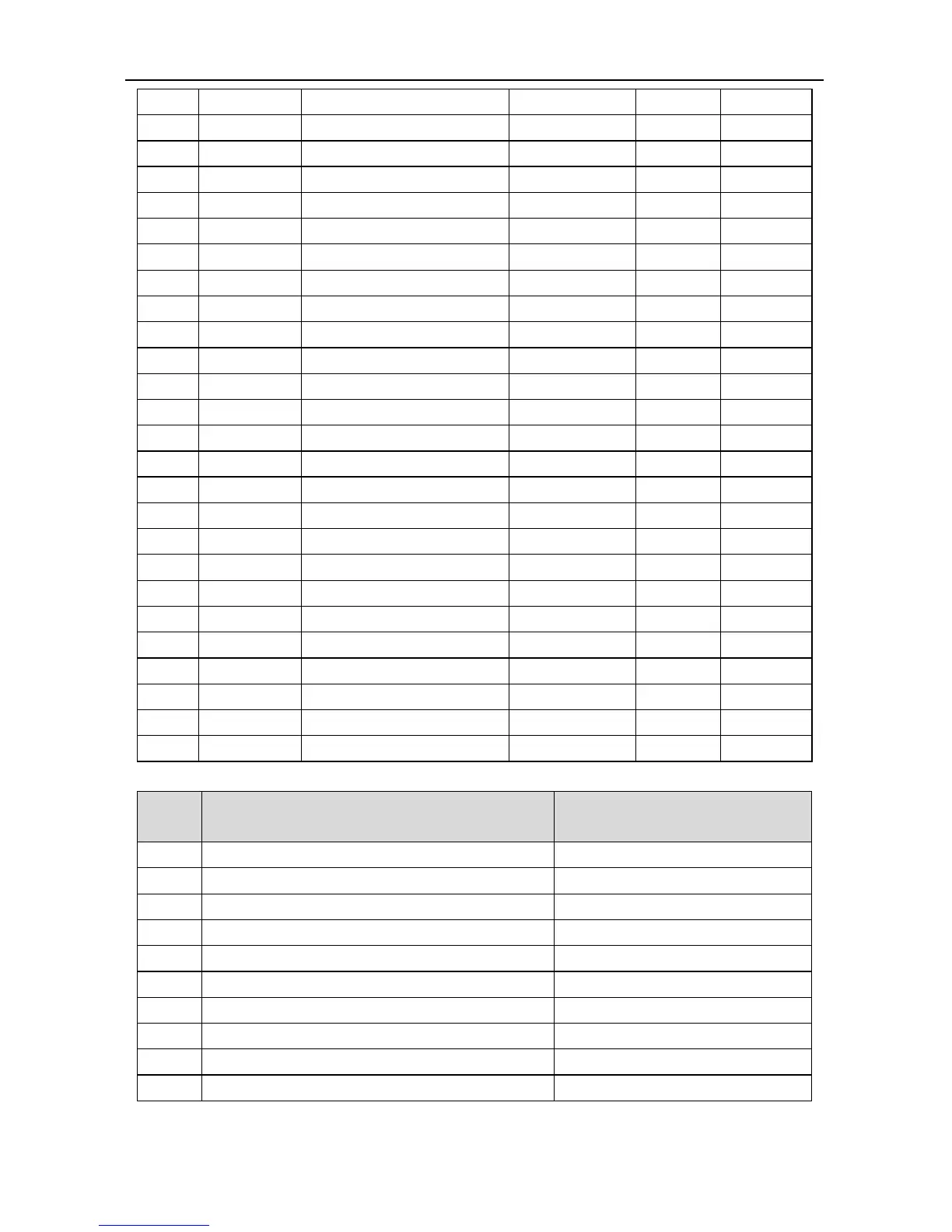
6078
h
VAR Current actual value INTEGER16 RO Y
6079
h
VAR DC link circuit voltage UNSIGNED32 RO Y
607A
h
VAR Target position INTEGER32 RW Y
607C
h
VAR Home offset INTEGER32 RW Y
607D
h
ARRAY Software position limit INTEGER32 RW Y
6080
h
VAR Max motor speed UNSIGNED32 RW Y
6081
h
VAR Profile velocity UNSIGNED32 RW Y
6083
h
VAR Profile acceleration UNSIGNED32 RW Y
6084
h
VAR Profile deceleration UNSIGNED32 RW Y
6085
h
VAR Quick stop deceleration UNSIGNED32 RW Y
6086
h
VAR Motion profile type INTEGER16 RO Y
6087
h
VAR Torque slope UNSIGNED32 RW Y
6088
h
VAR Torque profile type INTEGER16 RO Y
6093
h
ARRAY Position factor UNSIGNED32 RW Y
6098
h
VAR Homing method INTEGER8 RW Y
6099
h
ARRAY Homing speeds UNSIGNED32 RW Y
60C0
h
VAR Interpolation sub mode select INTEGER16 RO Y
60C1
h
ARRAY Interpolation data record INTEGER32 RW Y
60C2
h
RECORD Interpolation time period INTEGER8 RW Y
60F4
h
VAR Following error actual value INTEGER32 RO Y
60F8
h
VAR Max slippage INTEGER32 RW Y
60FA
h
VAR Control effort INTEGER32 RO Y
60FC
h
VAR Position demand value* INTEGER32 RO Y
60FD
h
VAR Digital inputs UNSIGNED32 RO Y
60FE
h
ARRAY Digital outputs UNSIGNED32 RO Y
60FF
h
VAR Target velocity INTEGER32 RW Y
Table 8-8 CANopen fault code
Display Fault name
32-bit fault code(16-bit Error
Code+16-bit additional message)
Er01-0 IGBT fault FF01-0101h
Er01-1 Brake tube fault (7.5kW and above model) FF01-0101h
Er02-0 Encoder fault–The encoder wire break 7300-0200h
Er02-1 Encoder fault–Encoder feedback error is too large 7300-0201h
Er02-2 Encoder fault–Parity error 7300-0202h
Er02-3 Encoder fault–CRC error 7300-0203h
Er02-4 Encoder fault–Frame error 7300-0204h
Er02-5 Encoder fault–Short frame error 7300-0205h
Er02-6 Encoder fault–Encoder overtime 7300-0206h
Er02-7 Encoder fault–FPGA overtime 7300-0207h

 Loading...
Loading...