SV-DA200 series AC servo drives Appendix
‐268‐
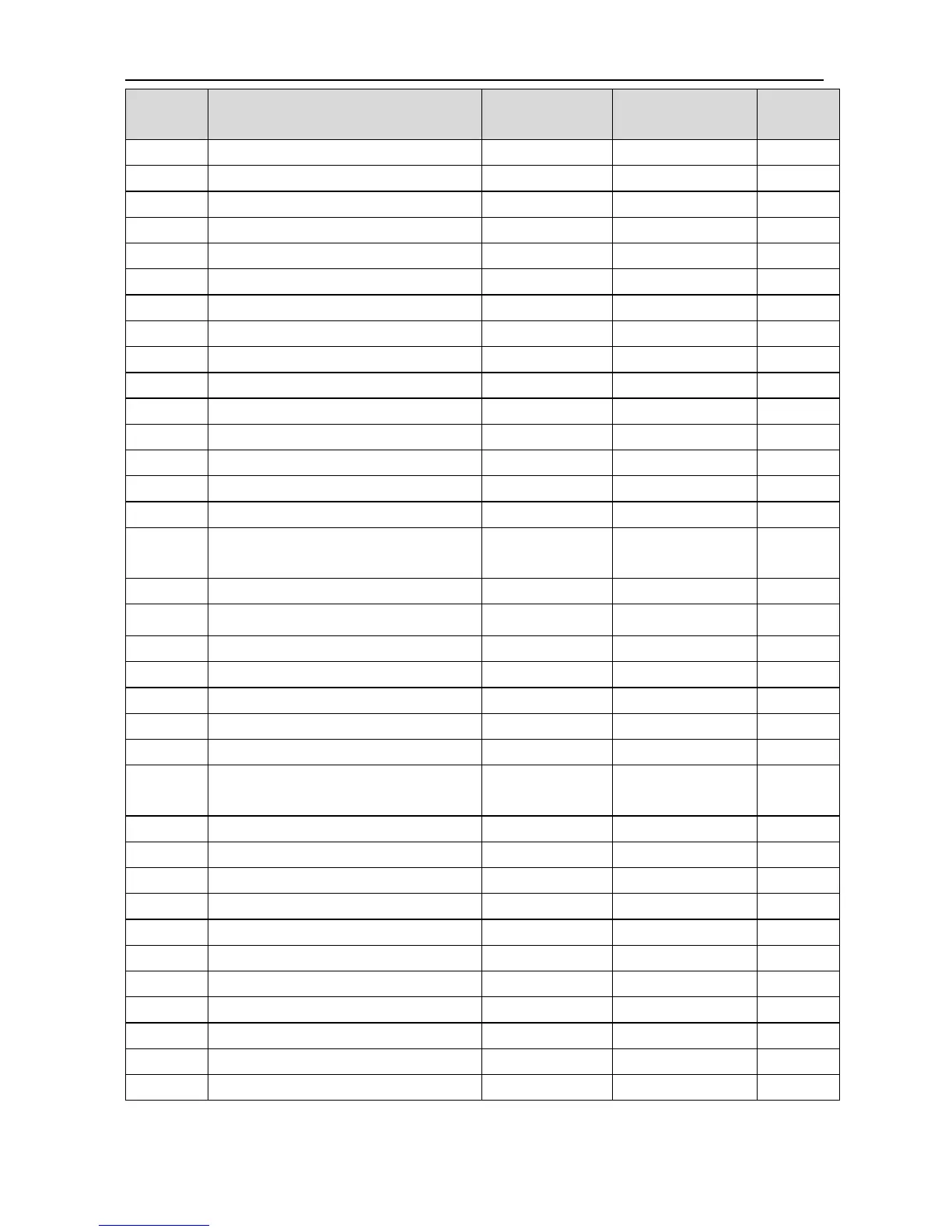
Function
code
Name Unit Range
Available
Mode
R0.04 Retention pulse reference unit -(2
63
-1)~(2
31
-1) PF
R0.05 Hybrid control deviation reference unit -(2
63
-1)~(2
31
-1) F
R0.06 Current torque % -500.0~500.0 PSTF
R0.07 DC voltage of main circuit V 0.0~1000.0 PSTF
R0.08 Voltage of control power V 0.0~1000.0 PSTF
R0.09 Output voltage Vrms 0.0~1000.0 PSTF
R0.10 Output current Arms 0.0~1000.0 PSTF
R0.11 Drive temperature ℃ -55.0~180.0 PSTF
R0.12 Torque limit % -500.0~500.0 PSTF
R0.13 Encoder feedback value pulse 0~(2
20
-1) PSTF
R0.14 Rotor relative to Z pulse position pulse 0~(2
20
-1) PSTF
R0.15 Inertia ratio of load % 0~10000 PSTF
R0.16 Output power % -500.0~500.0 PSTF
R0.17 Motor load ratio % 0~500 PSTF
R0.18 Molecule of actual electric gear ratio - 0~(2
31
-1) PF
R0.19
Denominator of actual electric gear
ratio
- 1~(2
31
-1) PF
R0.20 Position command speed r/min -9999.9~9999.9 PF
R0.21 Motor speed (filtering) r/min -9999.9~9999.9 PSTF
R0.22 PTP state - -1~4223 P
R0.23 Feedback of encoder absolute position pulse -(2
31
-1)~(2
31
-1) PSTF
R0.24 Encoder EEPROM data state - 0~3 PSTF
R0.25 Circles of multi-circle encoder - -32768~32767 PSTF
R0.26 Available encoder type - 0~6 PSTF
R0.27
EtherCAT clock synchronous
correction state
- 0~1 PSTF
R0.28 State of CANopen state machine - 0~18 PSTF
R0.29 Node of PROFIBUS-DP slave station - 0~99 PSTF
R0.30 System state - 0~5 PSTF
R0.31 IGBT state - 0~1 PSTF
R0.32 Current mode - 0~2 PSTF
R0.33 Power on time s 0~(2
31
-1) PSTF
R0.34 Operation time s 0~(2
31
-1) PSTF
R0.35 DSP software version - 0.00~10.00 PSTF
R0.36 FPGA software version - 0.00~10.00 PSTF
R0.37 Communication card software version - 0.00~10.00 PSTF
R0.38 Drive serial No.1 - 0~65535 PSTF

 Loading...
Loading...