File Version: 3.4 / JAKA Zu Series Hardware User Manual
8 Robot
The robot contains six joints and two aluminum arms. The base is used to connect the robot to the foundation,
and the tool end is used to connect the robot to the end-effector. The end-effector can move and rotate in the
workspace of the robot. This chapter will introduce the basic precautions during the installation of each
component of the robot system.
Robot contains six joints and two connecting arms, the upper arm and the lower arm. There is a ring-shaped
light indicating the robot’s state at the end of the robot, together with a pause/resume button, and there are two
buttons on the outside of the flange.
8.1
8.1.1
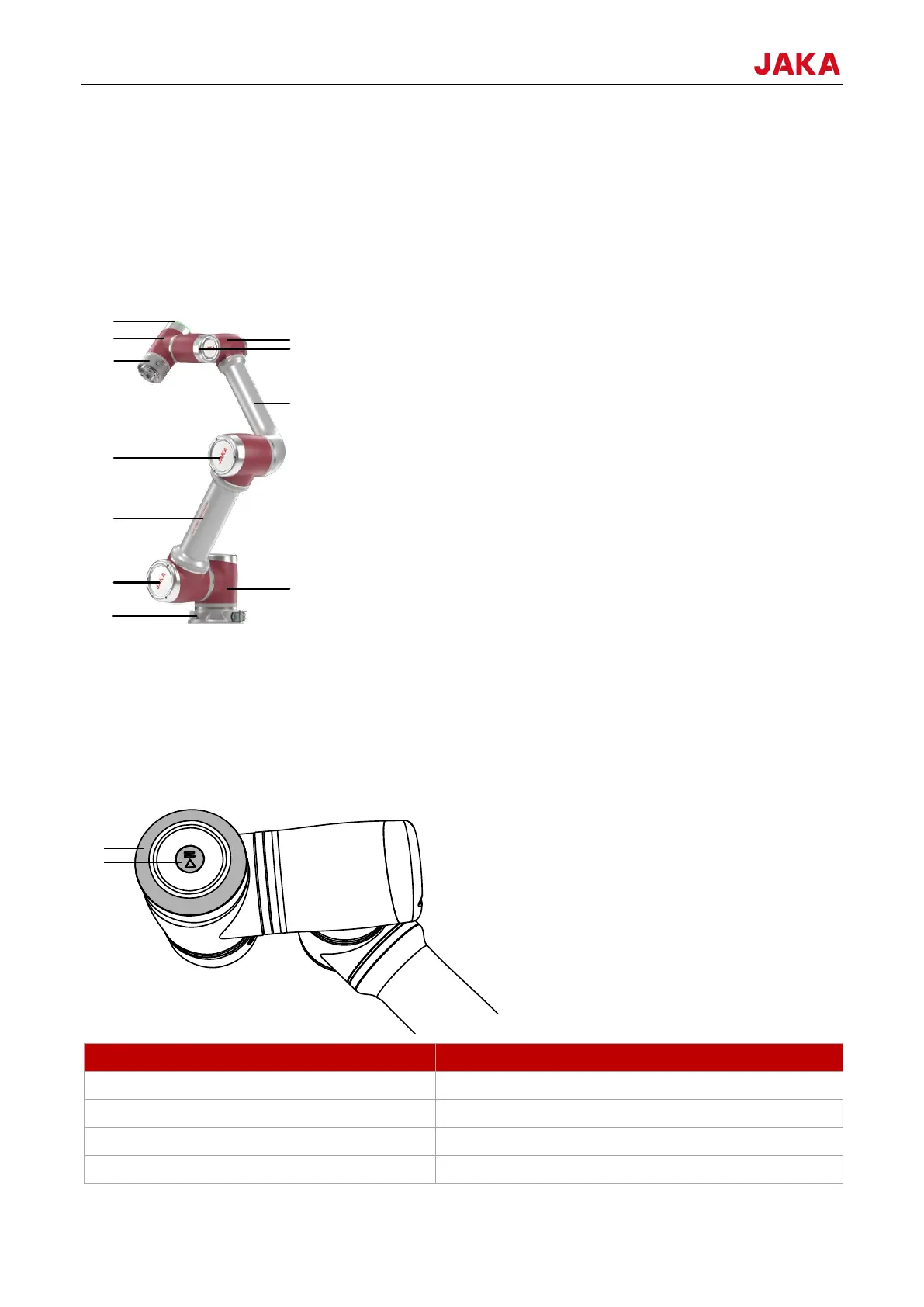
There is a ring-shaped light and a pause/resume button at the end of the robot.
The positions of the ring-shaped light and the button are shown in figure below, and the color meanings are
shown in table below. When the robot runs a program, you may press the button at the end of the robot to pause
it, and you may press again to resume.