External Control (I/O / Fieldbus) 45 DESKTOP ROBOT JR3000
6.2
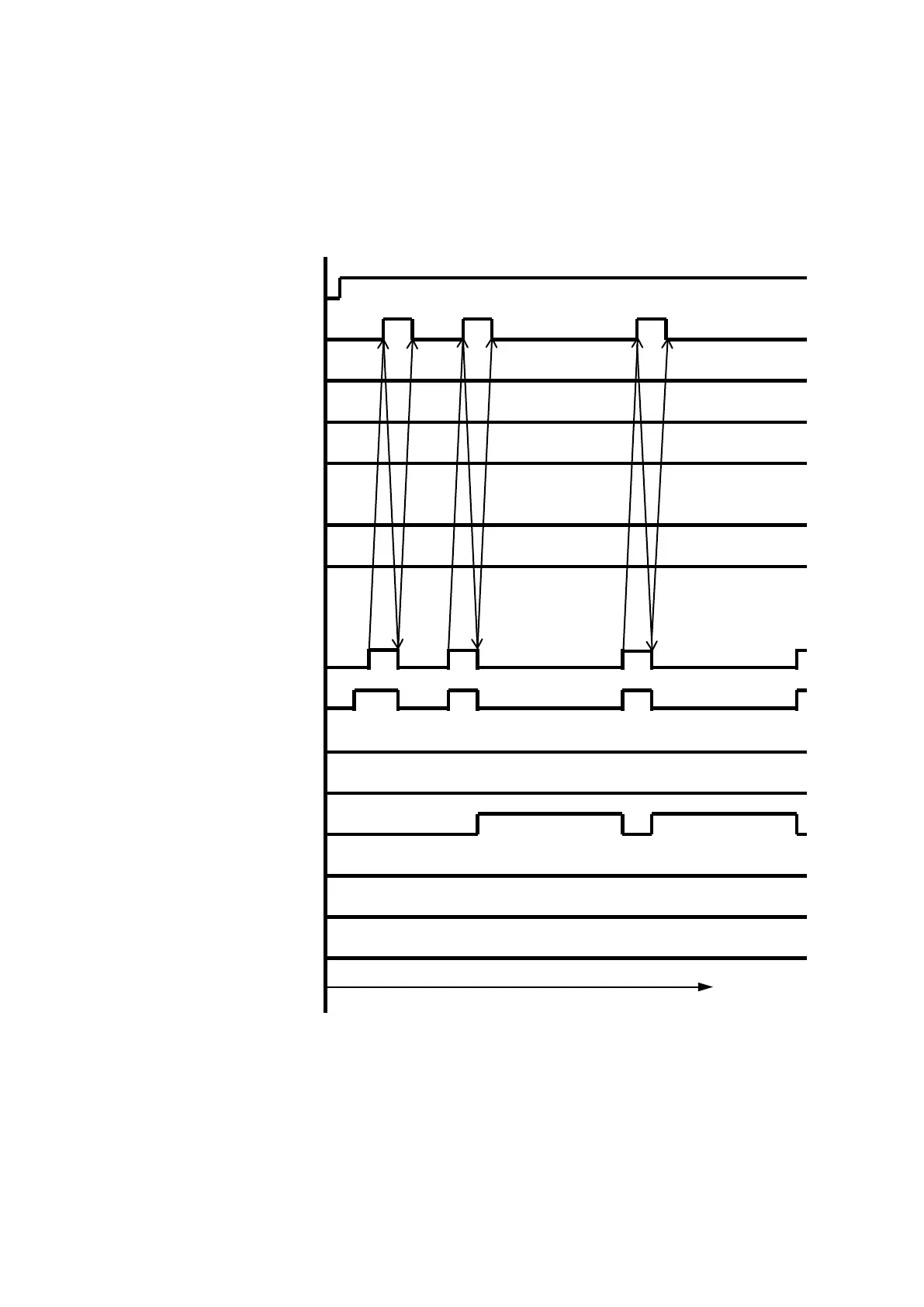
Power ON, Mechanical Initialization and Run Program
This chart shows when [All Program Common Settings] [Other Parameters] [Initialize] is set
to [Work Home after First Cycle].
Program Run
Time
Program Run
Mechanical
Initialization
#sysOut8 Position Error
#sysOut7 Emergency Stop
#sysOut6 Error
#sysOut5 Running
#sysOut4 Program Number Error
#sysOut3 Program Number ACK
#sysOut2 Robot Stopped
#sysOut1 Ready for Start
#sysIn12 Temporary Stop
#sysIn4 – 10 Program Number
#sysIn11 Last Work
#sysIn3 Program Number Load
#sysIn2 Free
#sysIn1 Start
Power
 Loading...
Loading...

