Art. No. SC 1000 KNX
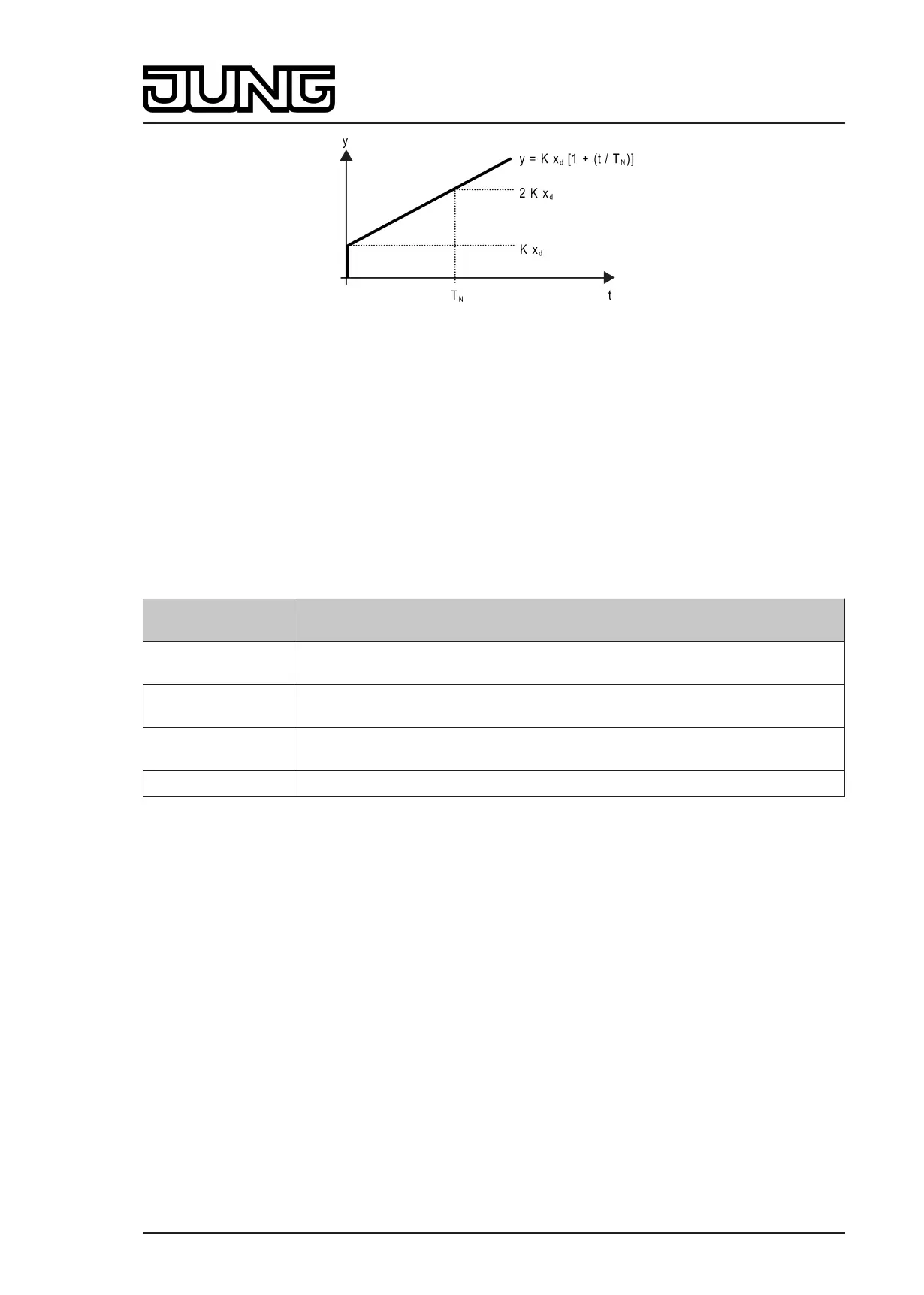
Figure 93: Function of the command value of a PI control
y: Command value
x
d
: Control difference (x
d
= x
set
- x
act
)
P = 1/K : Configurable proportional band
K = 1/P : Gain factor
T
N
: Configurable reset time
PI control algorithm: Command value y = K x
d
[1 + (t / T
N
)]
Deactivation of the reset time (setting = "0") ->
P control algorithm: Command value y = K x
d
Parameter
setting
Effect
P: Small
proportional range
Large overshoot in case of setpoint changes (possibly permanently),
quick adjustment to the setpoint
P: Large
proportional range
No (or small) overshoot but slow adjustment
T
N
: Short reset time Fast compensation of control deviations (ambient conditions), risk of
permanent oscillations
T
N
: Long reset time Slow compensation of control deviations
Effects of the settings for the control parameters
Adapting the 2-point feedback control
The 2-point control represents a very simple temperature control. For this type of feedback
control, two hysteresis temperature values are set. The upper and lower temperature hysteresis
limits can be adjusted via parameters. It has to be considered that…
- A small hysteresis will lead to small temperature variations but to a higher bus load.
- A large hysteresis switches less frequently but will cause uncomfortable temperature
variations.
Page 178 of 347
Software "Smart Control 501511"
Functional description

 Loading...
Loading...

