4.2.6 Setup mode: position
4.2.6.1 PNU 1773: homing type
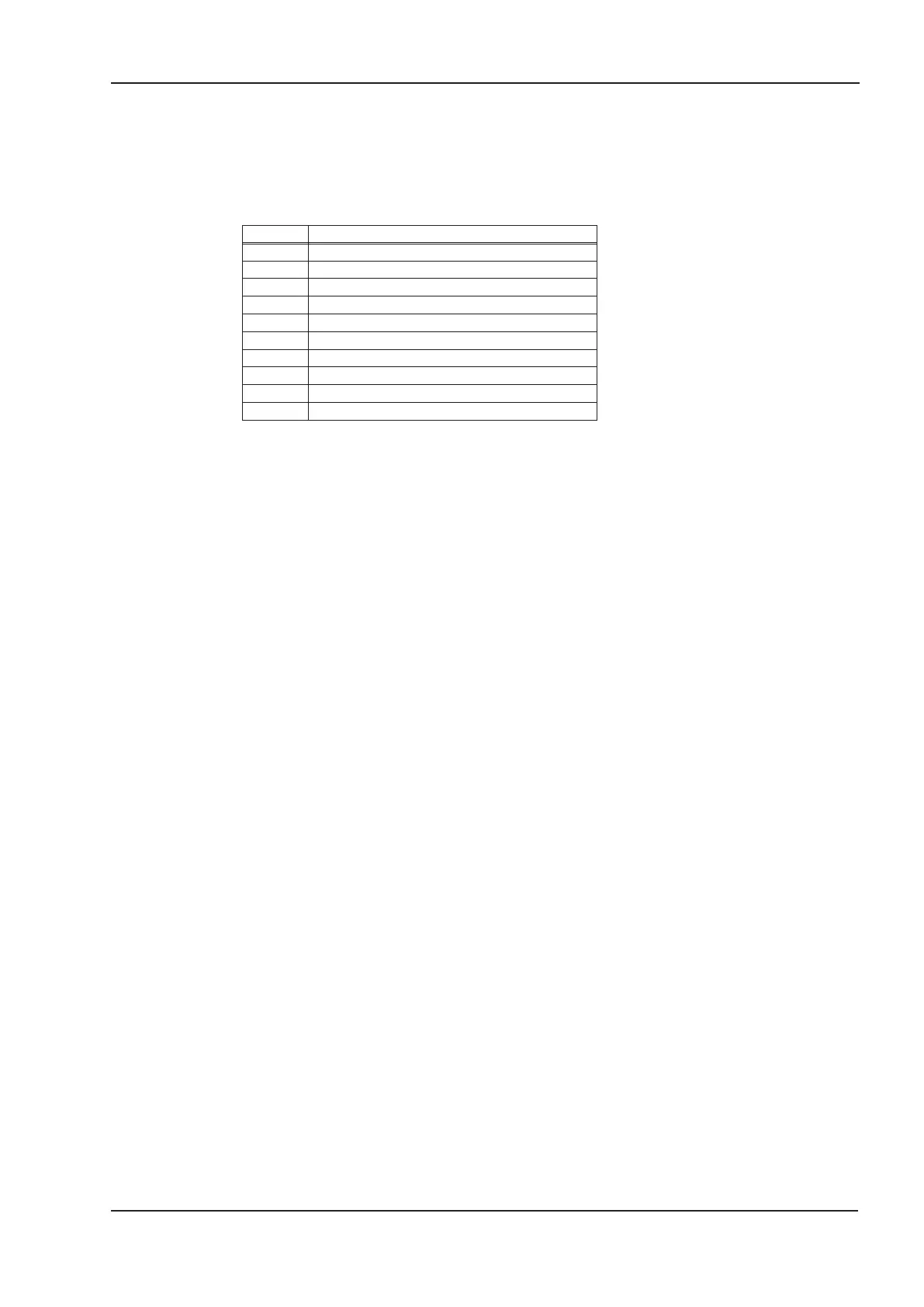
This parameter can be used to determine which type of homing run should be applied. The assign
-
ment can be seen in the following table:
PWE Type of homing run
0
Reference point at the present position
1
Initiator with resolver zero mark
2
Hardware limit-switch resolver zero mark
3
Initiator without resolver zero mark
4
Hardware limit-switch without resolver zero mark
5
Zero mark / feedback unit
6
Reference point at the actual position
7
Hardware limit-switch with resolver zero mark
8
Absolute SSI-position
9
Move to Mechanical Stop
4.2.6.2 PNU 1644: homing direction
This parameter can be used to determine the direction of motion for homing runs. If set equal 0,
then the direction of motion is negative; for a value 1 it is positive, and fora2itdepends on the dis
-
tance to the reference point in the direction in which the homing run started.
4.2.7 Actual values
4.2.7.1 PNU 1401: speed
For S400/S600 only.
The parameter value is the actual speed of the motor in increments / 250 µsec, which are the ampli-
fier’s internal units.
4.2.7.2 PNU 1402: incremental position, actual value
For S400/S600 only.
The parameter value is the actual position value in increments.
4.2.7.3 PNU 1800: actual position value in SI (User) units
The parameter value is the actual SI (user unit) position value.
4.2.7.4 PNU 1414: actual position, 32 bit floating decimal point format
For S400/S600 only. With this object the actual position (see ASCII-command PFB) can be read in
a 32 Bit Floating decimal point format (IEEE).
Right of decimal point positions will be truncated. This object is, aside from the data format, identi
-
cal to PNU1800.
Use:
PLC Controls that support only 16 Bit integer and 32 Bit floating decimal point.
PROFIBUS for S300/S400/S600/S700 31
Kollmorgen 04/2017 Parameter channel (PKW)

 Loading...
Loading...








