5.2.1 Positioning (operating mode 2)
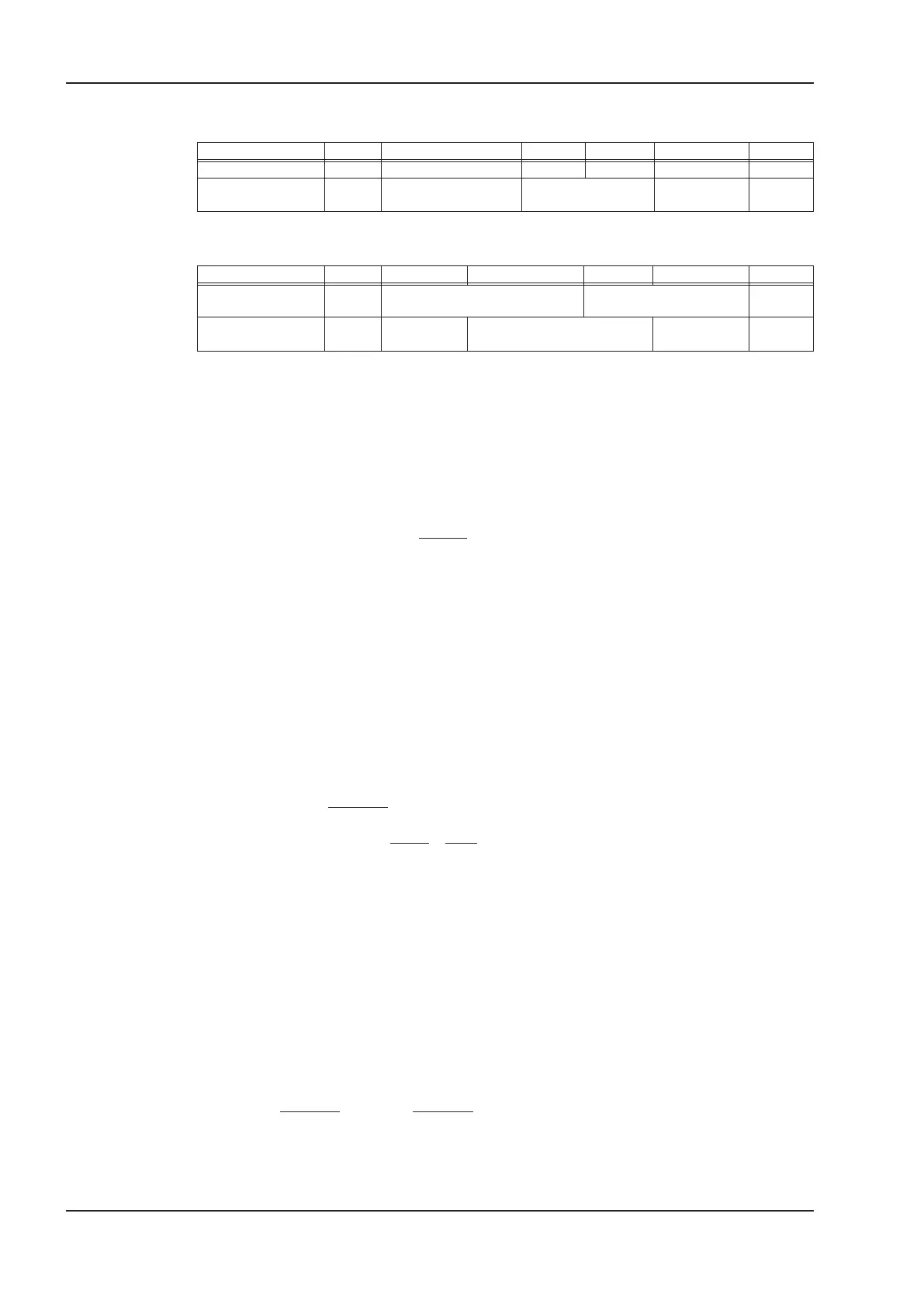
Direction PZD 1 PZD 2 PZD 3 PZD 4 PZD 5 PZD 6
Controller to Amplifier STW motion task no. or v
cmd
*- - - -
Amplifier to Controller ZSW
n
act
(16-bit)
actual position (32-bit)
manufacturer-
specific status
-
*: for jogging/homing
Alternative assignment when STW Bit 14=1 (Direct Motion Task):
Direction PZD 1 PZD 2 PZD 3 PZD 4 PZD 5 PZD 6
Controller to Amplifier STW
direct motion task: V
cmd
(32-bit)
position setpoint (32-bit)
motion
block type
Amplifier to Controller ZSW
n
act
(16-bit)
actual position (32-bit)
manufacturer-
specific status
-
Motion task number
The motion task number of the motion task to be started can lie in the range 1 to 180
(motion tasks in EEPROM) or 192 to 255 (motion tasks in RAM).
Speed Setpoint (v
cmd
)
This is just when jogging or homing is selected. PNU 1894 provide the scaling for this value.
See chapter 4.2.4.1 for more detail.
Actual speed (16-bit)
The representation of the 16-bit actual speed value is normalized to the parameter for
overspeed VOSPD
n
n
VOSPD
act
act
16
15
2=´
Actual position (32-bit)
The range for the incremental position covers values from -2
31
to (2
31
-1), whereby one
turn corresponds to 2
PRBASE
increments. Position is always reported in internal units.
Reporting in User Units (SI) is not supported.
Manufacturer-specific status
In the process data, the upper 16 bits of the manufacturer-specific status register
(PNU 1002) are made available. The numbering starts again from 0.
Details of the status register bits can be found in the table in chapter 4.2.3.3.
Speed setpoint for a direct motion task
The usable range for the speed is not limited by the available data area. It is limited by
the maximum achievable speed nmax, which is given by the speed parameter VLIM as
the final limit speed for the motor. Maximum speed is derived from the following formula:
vn
PGEARI
PGEARO
SI
PRBASE
,max max
=´ ´2
or, as an incremental value, from:
vn
sn
incr
PRBASE PRBASE
. max. max
max
sec
=´ ´
m
=´2
250
1 4000
2
, in each case with n
max
in revs/sec
Position setpoint for a direct motion task
The servo amplifier calculates all position values internally on an incremental basis only, so there
are limitations on the usable range of values for distances that are given in SI (user) units.
The range for the incremental position covers the values from -2
31
to (2
31
-1).
The resolution that is determined by the PGEARO (PNU1803) and PGEARI (PNU1802) parameters
and the variable PRBASE fix the usable range for position values.
The variable PRBASE determines, through the equation
n
PRBASE
= 2
, the number of increments per
motor turn. The value of PRBASE can only be 16 or 20.
PGEARO contains the number of increments that must be traversed when the distance to be
moved is PGEARI. The default values for PGEARO are 1048576 (PRBASE = 20) or 65536
(PRBASE = 16) and correspond to one turn. Number of turns that can be covered :
-2048..+2047 for PRBASE=16 and -32768..+32767 for PRBASE=20
The sensibly usable position range is derived as follows:
--221
31 31
* ...( ) *
PGEARI
PGEARO
PGEARI
PGEARO
for PGEARI <= PGEARO, or
--221
31 31
...( )
for PGEARI > PGEARO
Motion block type
The various types of motion block are described in chapter 4.2.5.3.
40 PROFIBUS for S300/S400/S600/S700
Process data channel 04/2017 Kollmorgen

 Loading...
Loading...








