73 / 109Issued: 11.10.2013 Version: KST VisionTech 2.1 V1
11 Programming
Syntax RET = VT_CHECKPOSE("Base of the area", "Limit value X", "Limit value Y", "Limit
value Z
", "Base of the gripping point", "Gripping point", "Tool")
VT_CHECKPOSE can only be used once the gripping point of the
component has been taught.
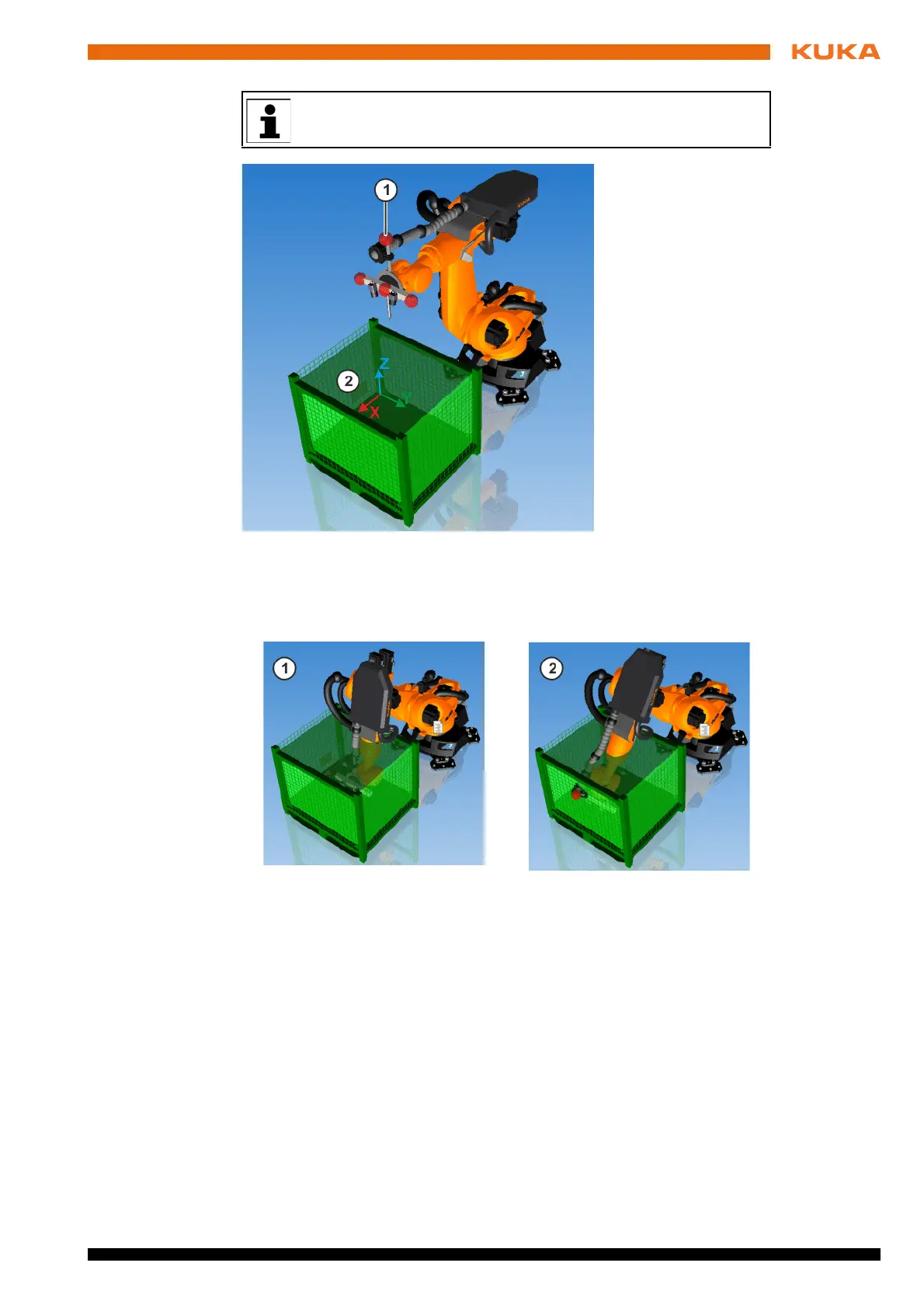
Fig. 11-2: Example: Defined points and defined area
1 Defined point on the robot
2 Defined area (green)
Fig. 11-3: Example: Defined points within and outside of the defined area
1 Defined point within the defined area
2 Defined point outside of the defined area