4.4.5 Thermal Electromotive Force (EMF) Compensation 53
| www.lakeshore.com
Menu Navigation:
Input SetupQInput (A, B, C, or D)QAutorangeQ(Off or On)
Input SetupQInput (A, B, C, or D)QRangeQ(See table below)
Default: On
Interface Command: INTYPE
4.4.5 Thermal
Electromotive Force
(EMF) Compensation
To keep power low and avoid sensor self heating, the sensor excitation is kept low.
There are two major problems that occur when measuring the resulting small DC
voltages. The first is external noise entering the measurement through the sensor
leads, which is discussed with sensor setup. The second is the presence of thermal
EMF voltages, or thermocouple voltages, in the lead wiring. Thermal EMF voltages
appear when there is a temperature gradient across a piece of voltage lead. Thermal
EMF voltages must exist because the sensor is almost never the same temperature as
the instrument. To minimize them, use careful wiring, make sure the voltage leads are
symmetrical in the type of metal used and how they are joined, and keep unnecessary
heat sources away from the leads. Even in a well-designed system thermal EMF volt-
ages can be an appreciable part of a low voltage sensor measurement.
The Model 336 can help with a thermal compensation algorithm. The instrument will
automatically reverse the polarity of the current source every other reading. The
average of the positive and negative sensor readings will cancel the thermal EMF
voltage that is present in the same polarity, regardless of current direction. This cor-
rection algorithm is enabled by default for RTD sensor types, but can be turned off
using the Current Reversal parameter.
The Current Reversal parameter defaults to On anytime the Sensor Type parameter is
changed to PTC RTD or NTC RTD.
Menu Navigation:
Input SetupQInput (A, B, C, or D)QCurrent ReversalQ(Off or On)
Default: On
Interface Command: INTYPE
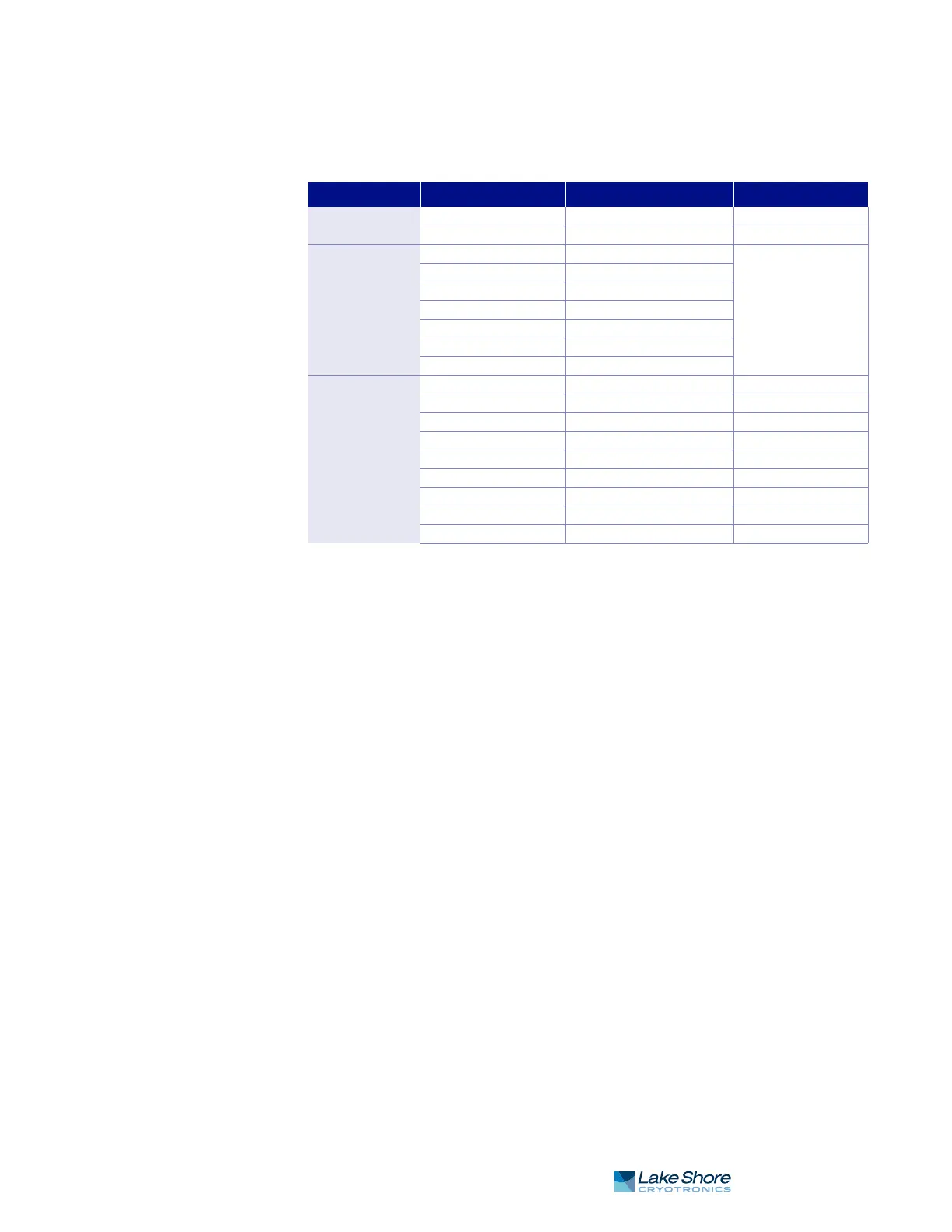
Sensor Type Available Range Settings Maximum Sensor Power Sensor Excitation
Diode
2.5 V (Silicon) 25 µW (at 10 µA exictation) 10 µA, 1 mA
10 V (GaAlAs) 100 µW (at 10 µA excitation) 10 µA, 1 mA
PTC RTD (Platinum)
10 ) 10 µW
1 mA
30 ) 30 µW
100 ) 100 µW
300 ) 300 µW
1 k) 1 mW
3 k) 3 mW
10 k) 10 mW
NTC RTD (Cernox)
10 ) 10 µW 1 mA
30 ) 2.7 µW 300 µA
100 ) 1 µW 100 µA
300 ) 270 nW 30 µA
1 k) 100 nW 10 µA
3 k) 27 nW 3 µA
10 k) 10 nW 1 µA
30 k) 2.7 nW 300 nA
100 k) 1 nW 100 nA
TABLE 4-8 Range and sensor power