Operating Manual
- Page 121 -
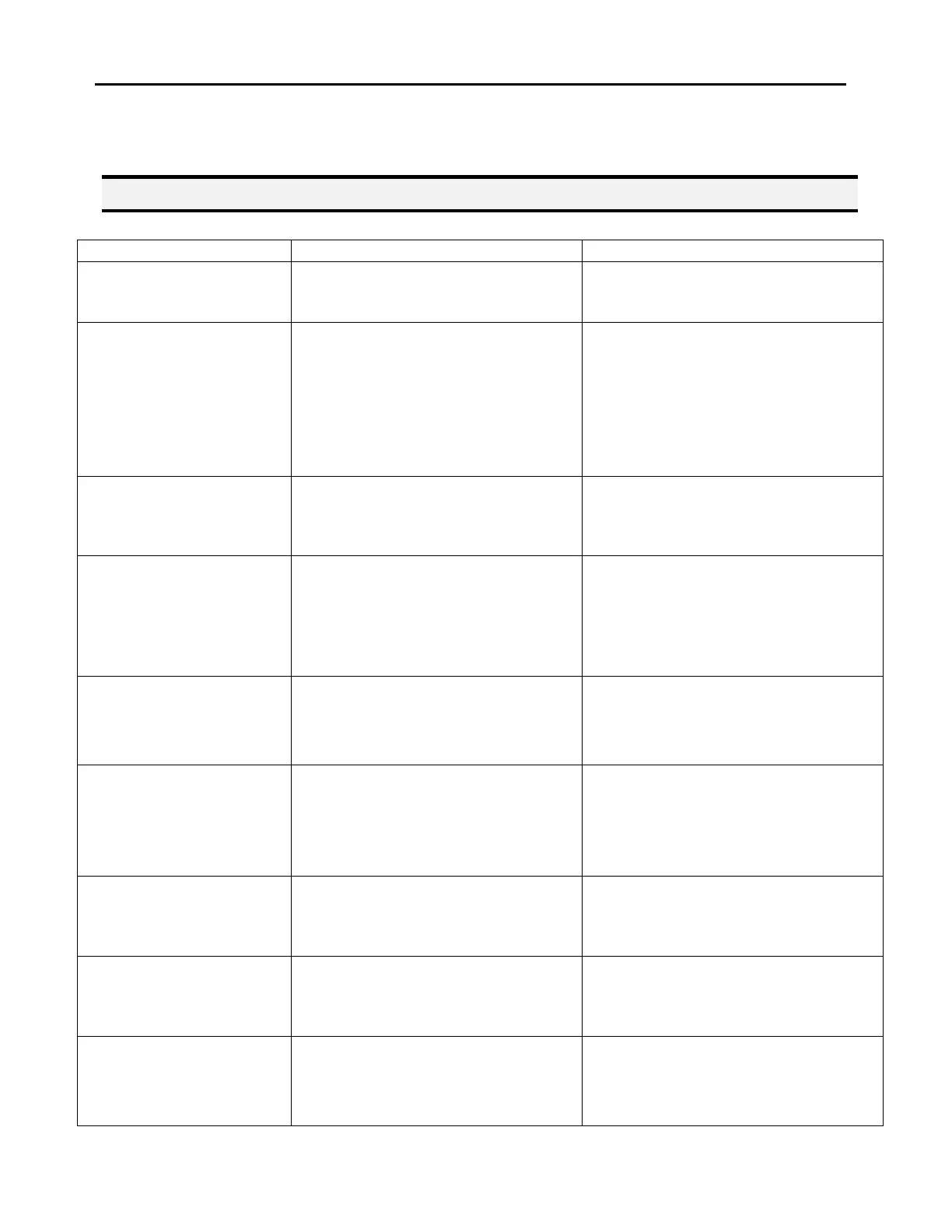
11.1.3 Check Methods
Check Point Check Action(See if) Corrective Action
Tilt or deviation of
machine
• Robot working position is
titled or inclined.
• Set the machine in a proper
vertical position.
Status of cables and hoses
• Electrical cables and
pneumatic hoses are
excessively twisted, bent, or
squeezed.
• Air leakage between
pneumatic hoses and fittings.
• Remove the causes of
twisting, bending, or
squeezing.
• Cut away the damaged parts
of hoses and make
connections.
Appearance
• Damage on the robot’s head
from clashes during
operation.
• Pay attention to working area
of robot and remove any
obstacle.
Stability on work bench
• The robot is too close to the
edge of the work table.
• Rearrange the position of the
robot on the table.
• Remove sources causing table
vibration.
Motor running condition
• Infiltration of grease.
• Performance degradation
due to overload.
• Replace motor (see agent).
Motions, connections, and
joints
• The axes are not moving
smoothly.
• Noises, vibrations, and / or
shakes.
• Grease up.
• Reset and adjust
gains(Contact agent for
setting).
Unfastened/loose bolts
and screws
• Loose or broken bolts and
nuts.
• Tighten loose bolts and nuts.
Take corrective action to
remove the cause.
Internal wires and
connectors
• Stripped or damaged
external cover or shield on
cable and/or connectors.
• Replace the damaged cables
or connectors with new
ones(see agent).
Accuracy and precision
• Z run out over X or Y larger
than 0.2mm.
• Wear on timing belt.
• Contact agent.
• Replace timing belt (See
agent).

 Loading...
Loading...