Operating Manual
- Page 90 -
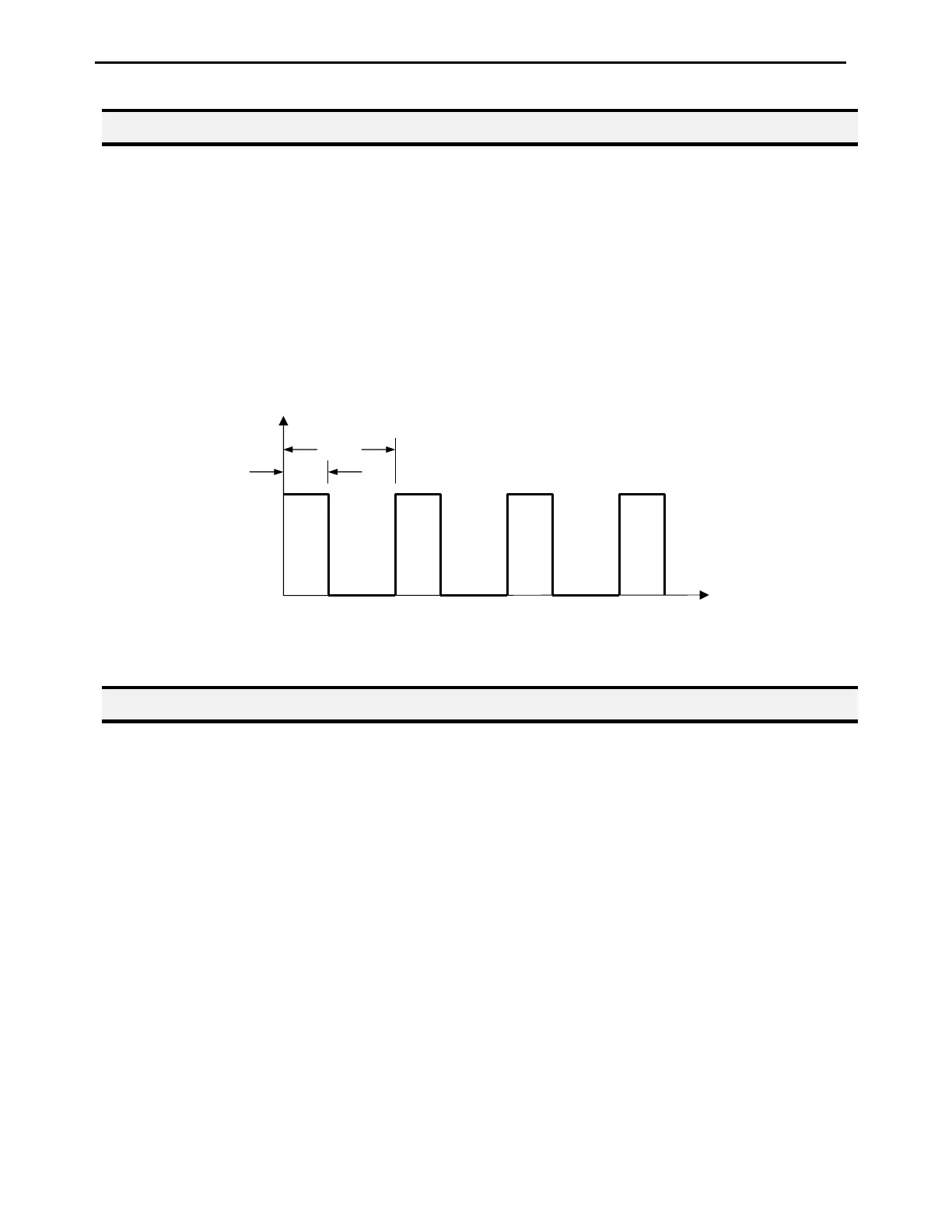
7.4.12 Auto Purge Setup
After the end of a program, the tip will go to the home position and material will be purged in a
continuous loop according to the parameters registered in the Auto Purge Setup command.
This command is very useful for two part materials that have a very short pot life.
For example, if a Wait Time of 5s and a Purge Time of 2s is registered in the Auto Purge Setup, the
following chart shows the Purge pattern.
7.4.13 ESTOP Output Status
After receiving the emergency stop signal, the robot can set the status of all the outputs as:
• INITIAL: The status (On/Off) of the outputs is set as the status set by the Initial IO
command. See Initial Output Port (Section 7.2.5)
• KEEP OUTPUT STATUS: The status (On/Off) of the outputs is left as it was before the
emergency signal.
Time
s
Dis
enser OFF
Dis
enser ON
Wait
Purge
2 751210 15

 Loading...
Loading...