• DOK-DIAX02-DDS02.1*ANA-ANW1-EN-E1,44 • 12.96
83
7. Commissioning the functions of the digital AC servo drive
The desired torque reduction is M
max desired
= 20 Nm
The installed motor/drive controller
combination is: MDD112B.-N-030
DDS 2.1-050
Mains power supply with
stabilized DC link circuit.
Procedure:
1. For the above motor/controller combination, the following figures can
be found in the selection data list:
– Nominal torque
M
dN
= 17.5 Nm (uncooled motor)
– Full torque M
max
= 35.2 Nm
2. Putting these figures into the equation, we obtain:
Reduced torque [%] =
3. Enter the value in the parameter, e.g. "current limit 1": 114
Example of a torque
reduction calculation
The full torque for this motor/controller combination is M
max.
=
35.2 [Nm]. Referred to the nominal torque, this corresponds to
(M
dN
) 201%. Entering a higher value than 201 in the parameter
torque reduction would limit the drive controller to the full
torque M
max.
of the motor.
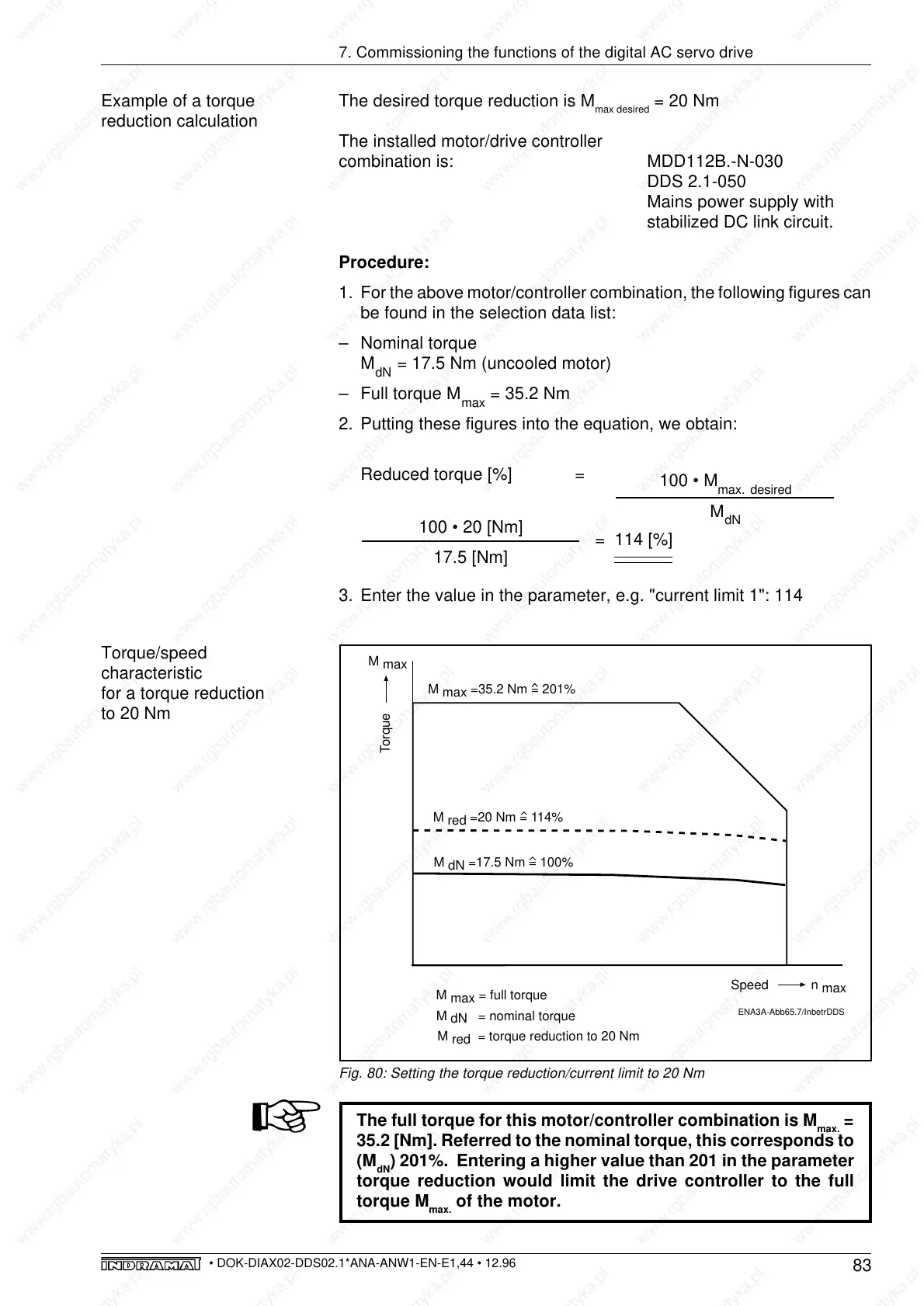
Fig. 80: Setting the torque reduction/current limit to 20 Nm
ENA3A-Abb65.7/InbetrDDS
n
max
Torque
M
max
= full torque
M
dN
= nominal torque
Speed
M
max
M
max
=35.2 Nm = 201%
M
red
=20 Nm = 114%
M
dN
=17.5 Nm = 100%
M
red
= torque reduction to 20 Nm
Torque/speed
characteristic
for a torque reduction
to 20 Nm
100 • 20 [Nm]
17.5 [Nm]
100 • M
max.
desired
M
dN
= 114 [%]